
Страницу Назад
Поискать другие аналоги этой работы

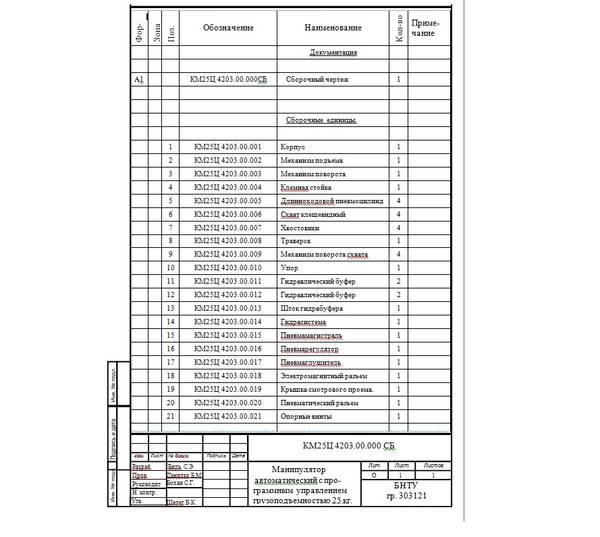


Автоматический манипулятор с программным управлением (АМПУ) грузоподъемностью 25 кгID: 193386Дата закачки: 09 Июля 2018 Продавец: kreuzberg (Напишите, если есть вопросы) Посмотреть другие работы этого продавца Тип работы: Диплом и связанное с ним Форматы файлов: КОМПАС, Microsoft Word Описание: Автоматический манипулятор с программным управлением (АМПУ) грузоподъемностью 25кг предназначен для автоматизации процесса механической обработки заготовок валов на участках механический цехов машиностроительных заводов с массовым, крупносерийным и серийным характером производства. Манипулятор предназначен для эксплуатации в условиях умеренного и холодного климата в исполнении УХЛ4 по ГОСТ 15150-82. Технические характеристики АМПУ таблица 10.1. Таблица 10.1. Техническая характеристика АМПУ Наименование параметров Данные 1 2 Грузоподъемность, кг 25 Количество рук, шт 2 Наибольшая масса заготовки, переносимой одной рукой, кг 12,5 Число степеней подвижности, шт 4(5) Количество точек позиционирования на каждой степени подвижности, шт 2 Наибольшее перемещение рук, мм - горизонтальное - вертикальное 640 230 Наибольший угол поворота рук в горизонтальной плоскости , град 180 Наибольший угол между осями рук, град 180 Наибольший угол поворота схвата, град 180 Максимальные скорости перемещения: - горизонтального, м/с - вертикального, м/с - поворота рук втянутых, град/с - поворота схвата, град/с 1,6 0,4 100 180 Средние скорости перемещения двойного хода (вперед-назад) - горизонтального, м/с - вертикального, м/с - поворота рук втянутых, град/с - поворота схвата, град/с 1,0 0,3 90 150 Продолжение таблица 10.1 1 2 Точность позиционирования в горизонтальной плоскости на радиусе 1180мм, мм 0,1 Система координат цилиндрическая Типы исполнительных приводов пневматические Расстояния от пола до оси схватов в их нижнем положении, мм: 1190…1320 Рабочее давление воздуха, МПа 0,45+0,5 Габариты корпуса манипулятора в плане (длинна х ширина), мм 1200…750 Масса, кг 670 Устройство манипулятора (АМПУ). Основание манипулятора 1 устанавливается с помощью четырех опорных винтов 21, которые позволяют регулировать положение корпуса манипулятора над уровнем пола в пределах 140 мм. На основании закреплена тумба, несущая на себе механизмы подъема и поворота. Механизм поворота состаит из двух односторонних пневмацилиндров 14, поршни которых соединены шток рейкой, находящейся в зацеплении с шестерней. На концах рейки находятся винту служащие для ограничения перемещения рейки между упорами. В упорах установлены гидробуферы 12, которые определяют величину торможения хода. Механизм подъема состоит из пневмацилиндра 2 и штока 32, верхняя часть которого крепится к подвижной траверсе. К траверсе крепится штанга, несущая на себе регулируемые упоры. Торможение подвижных масс при подходе к упорам осуществляется гидробуферами. На клемной стойке с помощью зажимов закреплены левая и правая рука. Каждая рука состоит из двух длинноходовых пневмоцилиндров 5. на штоке которых закреплена траверса 8. На траверсе имеются хвостовики 7 позволяющие крепить сменные клещевидные захваты 6 ( диапазон диаметров заготовки от 20 мм до 100 мм). Траверса имеет штуцера для подвода пневмасистемы и управления движением частей захватов. Для предотвращения жестких ударов при подходе подвижных частей к упорам имеются гидравлические буфера. Гидравлический буфер состоит из корпуса, плунжера, направляющей втулки и обратных клапанов. Запитка буфера маслом осуществляется от гидросистемы АМПУ. Торможение ,работа буфера, осуществляется путем дросселирования масла через уменьшающийся по ходу кольцевой зазор. С целью уменьшения нагрева масла в буфере предусмотрено два обратных клапана, через один из которых нагретое масло поступает в гидросистему, а через другой поступает в буфер свежая порция масла. Пневмосистема предназначена для обеспечения перемещений механизмов манипулятора. Пневмооборудование (воздуховод 15) смонтировано на раме и панели. Сжатый воздух от цеховой сети поступает в пневмо систему через вентиль 20. Давление воздуха в системе манипулятора и схватов контролируется манометром. Очистка воздуха от частиц воды, компрессорного масла и твердых частиц осуществляется фильтром -влагоочистителем. Рабочее давление воздуха в системе должно составлять 0,4+0,005 МПа. Блок управления представляет собой стойку ЧПУ и предназначен для усиления и преобразования выходного сигнала от датчиков обратной связи, контролирующих линейные перемещения рабочих органов манипулятора, в в два или четыре дискретных сигнала для исполнительных органов станков по управлению рабочим циклом обработки и световой сигнализацией. Принцип работы манипулятора в паре со станком с ЧПУ. Рабочий цикл робототизированного модуля оснащенной блоком ЦПУ, накопителем с поштучным выделением заготовки, устройством ориентации заготовки на станке с ЧПУ и манипулятором для подачи и загрузки станка заготовками, осуществляется следующим образом: В начальной фазе цикла обработки рабочие органы станка и манипулятор занимают исходное положение. В этот период связи между электросхемами блока управления и станка заблокированы. При подачи сигнала то ЦПУ манипулятор начинает осуществлять рабочие движения в следующем порядке: - разворот руки манипулятора на угол положения загрузки; - выдвижения руки в направлении устройства поштучного выделения заготовок; - захват заготовки клещевидный захватом; - вдвижение руки в нулевое положение для разворота манипулятора в положение загрузки станка; - разворот манипулятора в положении загрузки станка; - выдвижение руки манипулятора в установочное положение заготовки в устройстве ориентации заготовки; - разжим захвата и вдвижение руки в нулевое положение; - автоматический зажим заготовки в станке; - процесс обработки заготовки в автоматическом режиме станка с ЧПУ или полуавтомата, в момент достижения деталью заданного размера срабатывает окончательная команда, обработка прекращается, и рабочие органы станка перемещаются в исходное положение; - выдвижение руки манипулятора в установочное положение заготовки в устройстве ориентации заготовки для захвата заготовки и ее захват; - вдвижение руки в нулевое положение для разворота манипулятора в положение загрузки нового станка либо выгрузки готовой детали; Процесс продолжается до получения необходимого количества обработанных деталей. Срабатывание предварительных и окончательных команд можно наблюдать по загоранию сигнальных лампочек блока управления. Подготовка робототизированного модуля к работе и порядок работы: 1. Произвести ежесменное техническое обслуживание манипулятора и станков модуля: - проверить давление сжатого воздуха в сети манипулятора и механизмов станка; - проверить наличие масла в резервуарах маслораспределителя и в фитильных масленках, а также подачу его на рабочие части оборудования; - проверить исправность электрооборудования и средств защиты от поражения электрическим током. 2. Произвести расчет и подготовку управляющей программы модуля с использование технической документации на программирование манипулятора и станков. 3. Произвести ввод программы в ЦПУ и наладку станков и манипулятора: - произвести ввод программы в ЦП устройство управления с пульта управления модулем; - произвести наладку станков модуля: установить необходимый для обработки вспомогательный и режущий инструмент в положения соответствующие управляющей программе; - произвести наладку манипулятора: установить требуемый клещевидный захват и механизмы контроля перемещения рабочих органов манипулятора. 4. Произвести процесс работы модуля на холостом ходу для выявления недочетов программы управления модуля. 5. Произвести обработку одной детали для контроля точности обработки заготовки и работы манипулятора. При обнаружении недочетов произвести устранение недочетов обработки. Размер файла: 564,4 Кбайт Фаил:
Коментариев: 0 |
||||
Есть вопросы? Посмотри часто задаваемые вопросы и ответы на них. Опять не то? Мы можем помочь сделать! |
||||
Вход в аккаунт:
Страницу Назад
Cодержание / Грузоподъёмые машины / Автоматический манипулятор с программным управлением (АМПУ) грузоподъемностью 25 кг
Вход в аккаунт: