
Страницу Назад
Поискать другие аналоги этой работы
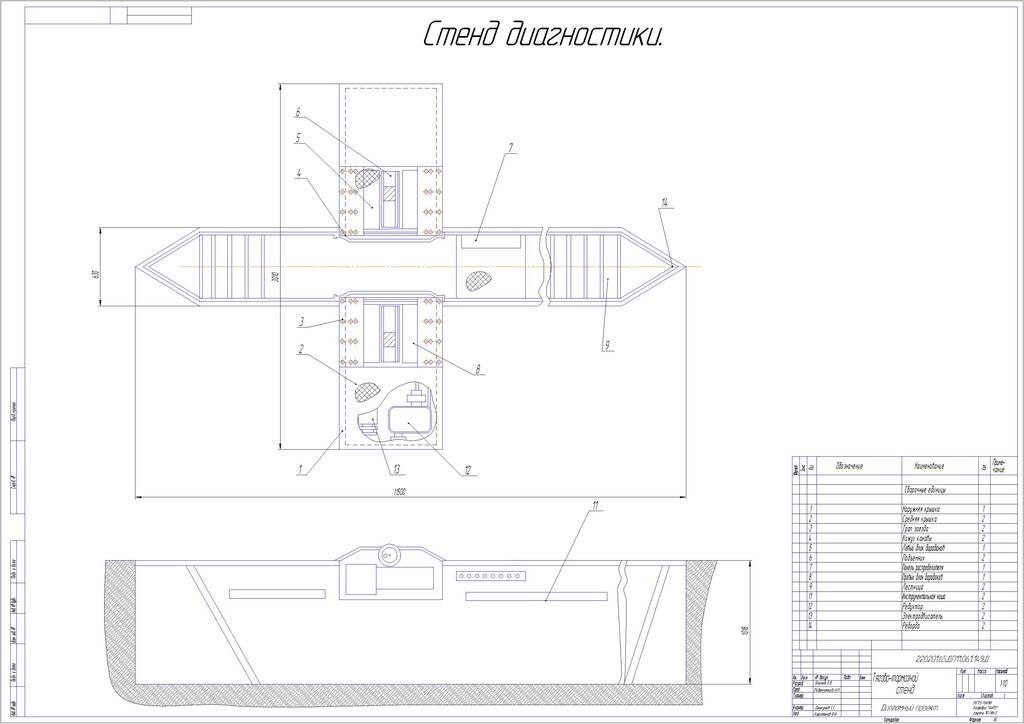
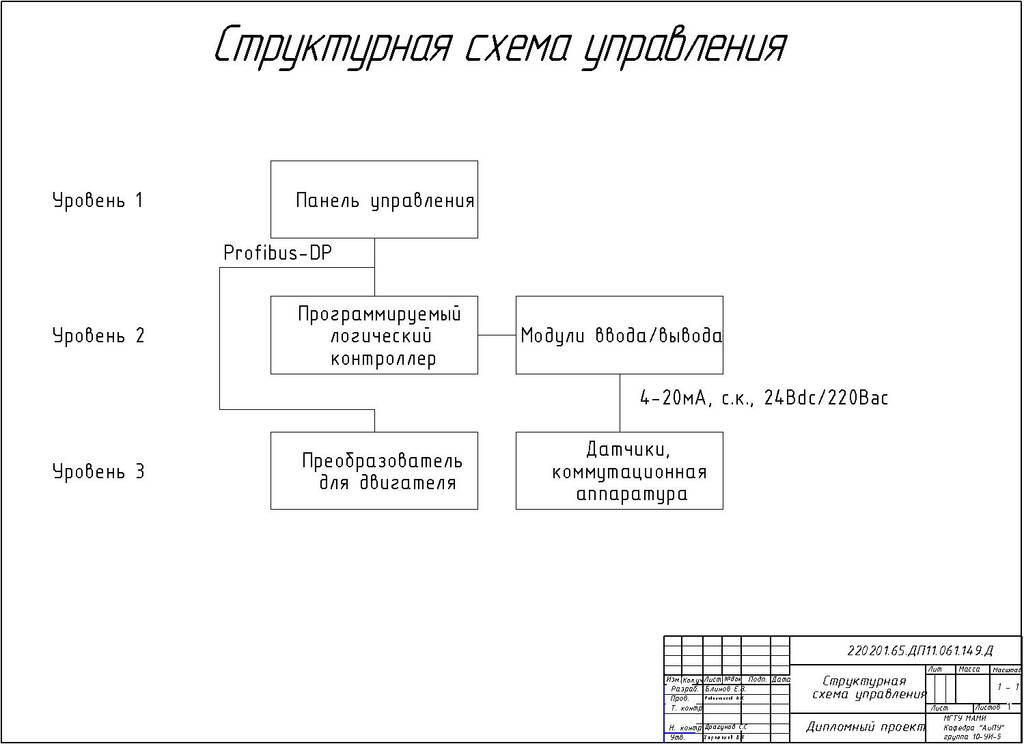
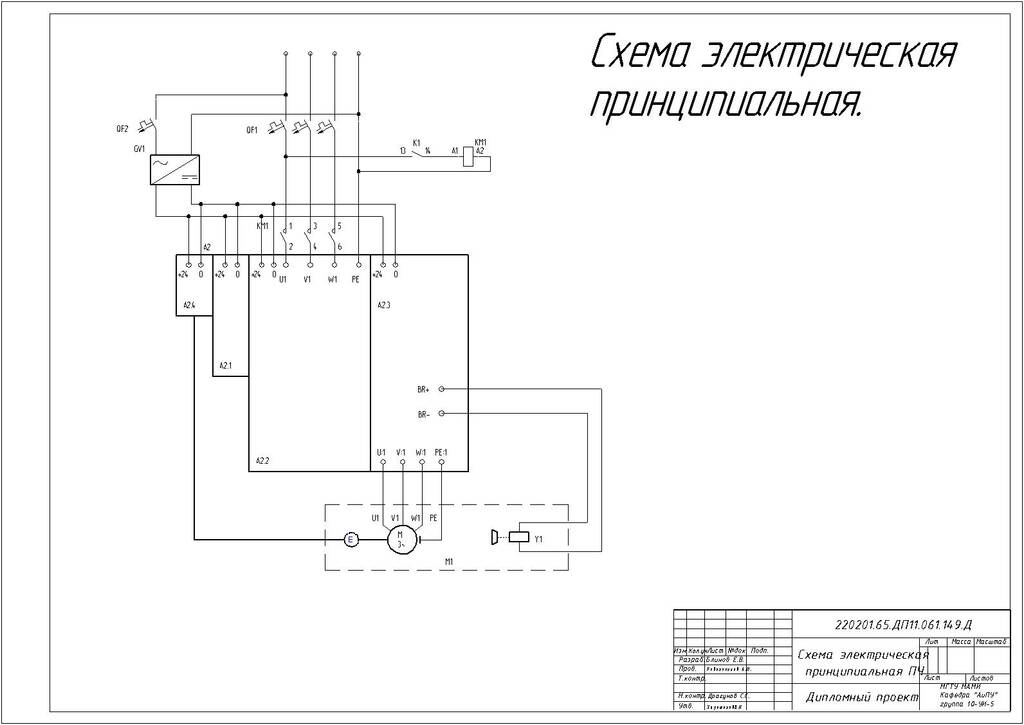
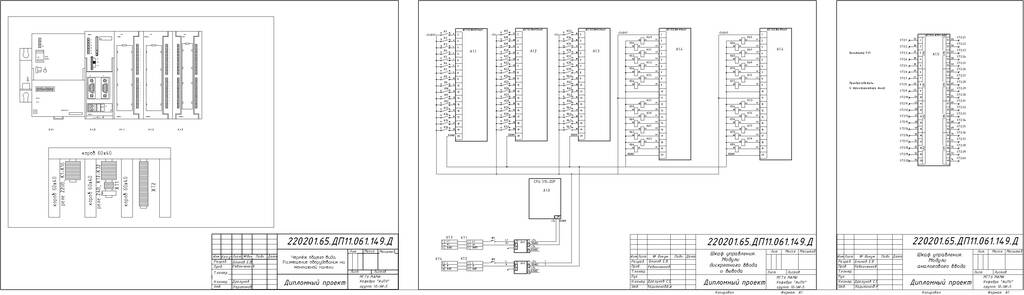
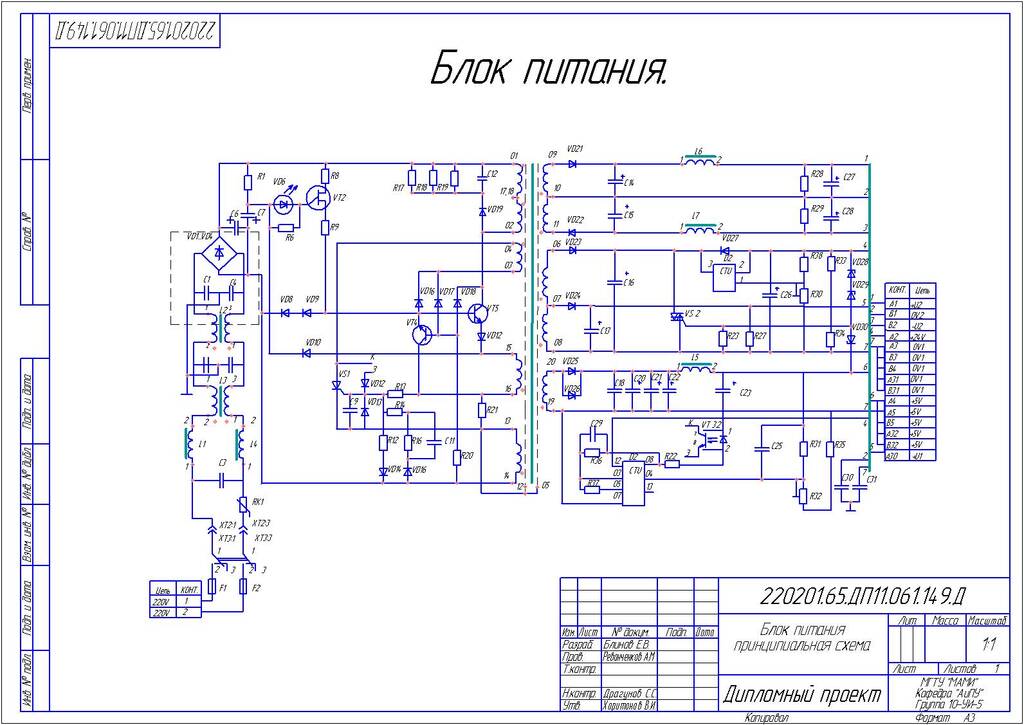
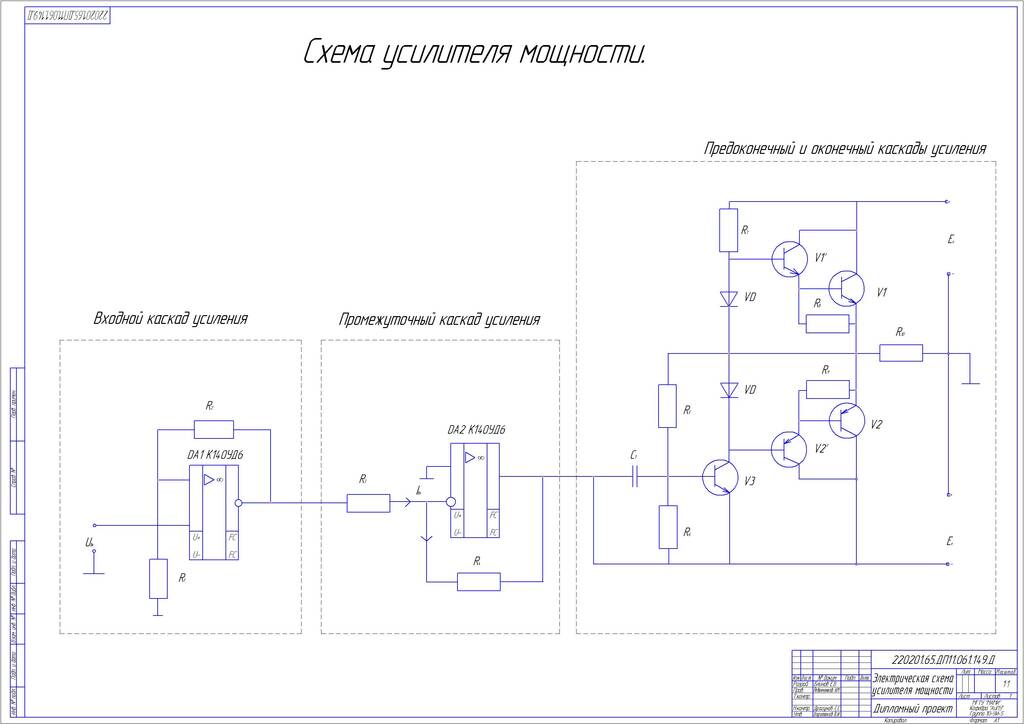
Модернизация стенда для диагностики тормозной системы автомобиля (конструкторская часть дипломного проекта + чертеж)ID: 218267Дата закачки: 18 Мая 2021 Продавец: kurs9 (Напишите, если есть вопросы) Посмотреть другие работы этого продавца Тип работы: Диплом и связанное с ним Форматы файлов: КОМПАС, Microsoft Word Описание: Содержание 1. Теоретическая часть 1.1 Текущее состояние процесса диагностики 1.2 Тормозная система автомобиля 1.3 Необходимость разработки стенда тормозного барабана 1.4 Цель и постановка задачи 2. Технологическая часть 2.1 Описание функциональной и структурной схемы системы 2.2 Блок питания электроники 2.3 Технические характеристики контроллеров и модулей ввода-вывода 2.4 Расчет усилителя мощности 3. Специальная часть 3.1 Среда конфигурирования контроллера 3.2 Краткая характеристика средств ЧМИ 3.3 Алгоритм работы системы 4. Экономический часть 5. БЖД 5.1 Безопасность жизнедеятельности 5.1.1 Анализ опасных и вредных факторов, действующих на разработчика 5.1.2 Расчет искусственного освещения рабочего места 5.2 Охрана окружающей среды 5.2.1 Анализ вредных и опасных факторов воздействующих на окружающую среду 5.2.2 Установка рукавного фильтра для очистки удаляемого воздуха Заключение Список литературы 1.3 Необходимость разработки стенда тормозного барабана Необходимо заметить, что существующее аппаратное и программное обеспечение испытательных стендов, имеющихся на предприятии, обладает рядом значительных недостатков. Среди данных недостатков следует выделить, прежде всего, отсутствие детальной информации о структуре разработанной системы. Отсутствие данной информации приводит к невозможности проведения ремонта в случае возникновения каких-либо отказов. Рассмотрим существующие испытательные стенды и информационные диагностические (и измерительные) системы, существующие в настоящее время в автомобильной промышленности. Данные системы существуют для различных подсистем автомобиля и одним из наиболее интересных объектов для изучения с точки зрения создания испытательных стендов являются поршневые кольца. При рассмотрении вопроса технического контроля поршневых колец выяснилось, что в настоящее время существует большое количество работ, посвященных различным вопросам качества изделий сложной формы. Тем самым можно сделать вывод, что тема контроля качества в автомобилестроении остается одной из наиболее актуальных. Но необходимо отметить, что большинство известных исследовательских работ направлены на регулирование качества непосредственно в производственном процессе. Непосредственно контроль качества на заключительном этапе производства рассматривают лишь отдельные авторы. В частности, можно выделить следующие работы: В [5] отмечается, что: «В некоторых случаях выборочный контроль исходного материала, заготовок, полуфабрикатов и готовых изделий ответственного назначения на заводах не гарантирует их высокое качество, особенно при серийном и массовом производстве. В настоящее время широкое распространение получает непрерывный неразрушающий контроль всей продукции на отдельных этапах производства». Автор ставит цель разработать новые методы и средства неразрушающего контроля, позволяющего проводить непрерывный контроль характеристик качества многослойных изделий, в частности металлофторопластовых лент. Для достижения данной цели автор предлагает использовать новый метод неразрушающего контроля на основе воздействия на объект исследования источником тепловой энергии. Данный метод позволяет определять толщины слоев, пористость бронзового каркаса, теплофизические свойства материала верхнего слоя четырехслойных металлофторопластовых лент. В [6] осуществляется «разработка и внедрение новых методов и измерительно-управляющей системы непрерывного активного контроля геометрических показателей вкладышей подшипников и износа режущего инструмента в процессе изготовления. Внедрение подобных методов позволило повысить производительность контроля, точность изготовления и обеспечить предупреждение появления дефектов». Разработанная автором система использует индуктивные датчики, выполнена на базе модуля микроконтроллера CPU 188-5MX и модуля аналогового вывода AO 16-V8. Данная система содержит пять измерительных каналов: – первый предназначен для контроля высоты вкладышей и отклонения от плоскопараллельности поверхностей разъема вкладыша относительно образующей наружной цилиндрической поверхности; – второй – для контроля прилегания наружной цилиндрической поверхности вкладыша к поверхности постели гнезда контрольного приспособления; – третий – для измерения температуры поверхности вкладыша, в процессе обработки; – четвертый – для контроля радиальной толщины вкладыша; – пятый – для контроля износа режущего инструмента алмазно-расточного станка; и датчик положения, определяющий наличие вкладыша в зоне обработки, два микроконтроллерных модуля, в которых происходит обработка измеренных показателей по заложенной программе и модуль аналогового вывода, использующегося для управления станками и автоподналадчиками режущих инструментов. В [9] осуществляется разработка бесконтактного неразрушающего микроволнового метода контроля поверхностной влажности и среднеинтегральной влажности твёрдых материалов и реализующего его устройства на основе математического описания взаимодействия электромагнитного поля СВЧ диапазона с влажным материалом, обеспечивающих повышение оперативности и точности измерений. В [11] говорится, что «Широкий спектр поглощающих материалов и покрытий, а также сложные методики их нанесения на металлическую поверхность, приводят к необходимости применения специализированных приборов неразрушающего контроля электрофизических и геометрических параметров толщины слоя в сантиметровом диапазоне длин волн». В результате автором разработан микроволновой бесконтактный метод поверхностной волны для одновременного определения толщины, электрофизических параметров и неоднородностей слоя магнитодиэлектрических покрытий на металле. В [13] автором разработан микроволновый метод и устройство определения электрофизических параметров магнитодиэлектрических и диэлектрических покрытий на металле и их неоднородностей на основе математического описания распространения медленной поверхностной волны в слое магнитодиэлектрика на металле. Кроме того, необходимо отметить, что для решения задач определения качества в настоящее время начинают применять и методы, относящиеся к так называемым методам искусственного интеллекта. Так, например, в [12] автором на основе аппарата нечеткой логики и использования программного пакета FuzzyTECH Professional решаются вопросы обеспечения заданного уровня потребительских свойств новых и традиционных видов продукции на основе эффективного управления показателями качества в процессах технологической обработки. В [10] объектом исследования являлись волоконно-оптические информационно-измерительные системы мониторинга сложных технических объектов. В качестве одного из инструментов использовалось имитационное моделирование и сети Петри. Однако все эти публикации отражают перспективный взгляд на проблему качества металлических изделий сложной формы. На практике конкретно к контролю качества поршневых колец относятся более упрощенно. Если рассмотреть весь спектр приборов и измерительных систем, то можно выделить следующие технические средства: Для контроля хромового покрытия на поршневых кольцах на базе магнитного толщиномера покрытий МТ-201 разработан толщиномер МТ-201К. Для контроля толщины хромовых покрытий поршневых колец для технологического и приемочного контроля деталей в лабораторных и цеховых условиях был разработан толщиномер СИ-14. Для контроля рабочей поверхности профиля поршневых колец в производственных условиях по следующим параметрам: бочкообразность, конусность, смещение пояска используется прибор для контроля рабочей поверхности профиля поршневых колец БВ-7618. Допустимая погрешность прибора при контроле - 30% от допускаемого диапазона значений контролируемых параметров. Также данным ОАО «НИИизмерения» выпускаются такие приборы как: прибор для контроля радиальных зазоров подшипников модель БВ-7660 и прибор для контроля осевых зазоров подшипников модель БВ-7661; а также: – электронный профилометр портативный для измерения параметров шероховатости методом ощупывания плоских и цилиндрических (наружных и внутренних) поверхностей ответственных деталей. Измеряемые параметры — Ra/Rq/Rz/Rmax/Sm. Основная относительная погрешность измерения — не более 2,5%. – стационарный вариант профилометра-профилографа автоматизированного, обладающего широкими функциональными возможностями. Данные приборы также возможно применять в контроле качества поршневых колец. Для контроля угла "трапеции" и высоты поршневого кольца предлагается использовать прибор ЦП107. В основе этого прибора лежит индуктивный способ преобразования линейных перемещений в электрический сигнал. Предел допускаемой погрешности прибора при измерении угла, составляет 5 мин. Отдельными авторами предлагается использовать вибродиагностику при контроле качества поршневых колец двигателей внутреннего сгорания. Иностранными фирмами предлагаются системы измерений с более высокой степенью автоматизации. Так, фирма «General Electric» предлагает использовать систему тестирования Vector 2DVIP. В основе системы лежит метод вихревых токов. Система включает в себя одноканальный прибор Vector 2d, двухчастотный инструмент вихревых токов и программируемый логический контроллер (ПЛК) с встроенным сенсорным дисплеем. Система предназначена, прежде всего, для обнаружения трещин в процессе производства, сортировки по качеству термической обработки и оценки поверхности опытных образцов. Также вихретоковый метод измерения лежит в основе системы измерения Eloscan производства Rohmann GmbH. Для перемещения датчика по поверхности измерения используется промышленный робот. В результате можно видеть, что в настоящее время основные усилия исследователей сосредоточены на разработке информационно-измерительных систем машиностроительных изделий. 2. Технологическая часть 2.1 Описание функциональной и структурной схемы системы Стенд состоит из двух модулей роликовой установки для левого и правого колеса, стойки управления, содержащей ПЭВМ и силовые электрические элементы (силовая панель), светофора или информационного табло и датчика усилия. Роликовая установка измеряет массу диагностируемой оси и приводит в движение колеса этой оси для измерения тормозной силы. Рис. 2.1 Функциональная схема стенда В соответствии с требованиями, описанными выше, разработанная система автоматизации должна реализовать следующие функции: 1. Прием сигналов от датчиков состояния технологического процесса 2. Выдавать управляющие сигналы на исполнительные механизмы 3. Осуществлять самодиагностику технического состояния технических средств Для реализации заданных функций используем систему, имеющие три уровня: Для реализации подобных функций создадим систему управления со следующей структурой: Уровень 1: средства КИПиА и преобразователи частоты. Уровень 2: уровень контроллеров и модулей ввода/вывода. Уровень 3: уровень человеко-машинного интерфейса. При проектировании испытательных стендов, как правило, считается, что подача оборудования к месту проведения испытаний осуществляется автоматически. Однако это не тривиальная задача. Рассмотрим процесс выбора преобразователя частоты для двигателя, Осуществляющего транспортировку объекта испытаний к месту контроля. В качестве такого двигателя в настоящее время используется асинхронный двигатель с короткозамкнутым ротором. Таблица 1. Параметры существующего двигателя тип Pном, кВт n об/мин КПД, % Cos Iном, А Мном, Н*м Iпуск Iном Число пусков J Кг*м2 Масса, кг 5АН200S6/24 5,6 920 83 0,76 13,5 60 2,3 5,5 180 0,46 215 Выбор коммутационной аппаратуры Выбор коммутационной аппаратуры заключается в выборе: 1) выбор контактора КМ1; 2) выбор промежуточных реле. Выбор контактора Сформируем требования к контактору: 1) Напряжение питания катушки Uпит.=210 - 250 В, 50Гц. 2) Наличие 1-го нормально замкнутого контакта, 1 нормально -открытого контакта.. 3) Номинальный ток контактов больше номинального тока двигателя. Выбираем контактор типа 3RT1034-1AP04 фирмы Siemens. Его характеристики приведены в таблице8. Таблица 3 Характеристики контактора 3RT1034-1AP04. Тип Номинальный ток контактов Номинальное напряжение Класс защиты Напряжение катушки Наличие доп. контакта 3RT1034-1AP04 А кВ В 25 До 0,4 IP54 ~220 2 НО, 2НЗ Выбор промежуточных реле Выбираем промежуточные реле типа «Релейный модуль PLC RSC 24DC/21(номер по каталогу 2966171). Характеристики реле приведены в таблице 5. Таблица 4 Характеристики релейного модуля PLC RSC Тип Время срабатывания Номинальное напряжение Номинальный ток Напряжение катушки 2966171 с В А В не более 0.05 До 220 До 6 = 240 Для управления данным электродвигателем будем использовать преобразователь типа Sinamics S120. Данный преобразователь имеет модульную конструкцию (в терминах фирмы-производителя Book-size): – Модуль управления CU320, заказной номер 6SL3040-0MA00-0AA1. – Модуль выпрямителя (в данной работе используется активный модуль выпрямления, который позволяет осуществлять рекуперацию энергии в сеть), заказной номер 6SL3130-7TE21-6AA3. – Модуль двигателя, заказной номер 6SL3120-1TE13-0AA3. Настройка преобразователя может выполняться как с помощью панели BOP, так и при помощи персонального компьютера и соответствующего программного обеспечения STARTER. Выбор данного преобразователя осуществлялся под электродвигатель при помощи специализированного программного обеспечения SIZER фирмы Siemens (данный выбор может также быть осуществлен по каталогу, главный критерий выбора – номинальный ток электродвигателя). К достоинствам данного преобразователя следует отнести его возможность работы с как с асинхронными, так и синхронными электродвигателями. Структура управления преобразователя для двигателя стандартная: состоит из двух контуров – контур тока и контур скорости. Контур скорости замыкается по датчику обратной связи, установленном на двигателе. Контур тока подчинен контуру скорости. Определение выходного тока осуществляется встроенной системой управления преобразователя. Для данного преобразователя производитель использует такие термины, такие как тип управления Vector и тип управления Servo. В случае использования в системах управления станками, а также для управления высокоточным оборудованием необходимо использовать режим «Сервоуправление». На рис. 2.2 представлена компоновка данного преобразователя на монтажной панели. Для снижения помех на питающую сеть (для обеспечения электромагнитной совместимости), а также для обеспечения рекуперативного торможения, данный преобразователь оснастим активным блоком питания типа 6SL3130-7TE21-6AA3: QF1-вводной автоматический выключатель; КМ1 – главный контактор; GV1 – блок питания электроники 220В АС/24В DC; A2.1 – модуль управления; А2.2. – модуль выпрямления; А2.3 – двигательный модуль Рис. 2.2. Размещение модулей для двигателя главного привода на монтажной панели 2.2 Блок питания электроники Настоящее техническое описание (в дальнейшем - ТО) предназначено для изучения источника питания 220В АС/24В DC, содержит описание конструкции, принцип работы, технические характеристики, необходимые для правильной эксплуатации. На входе модуля был разработан выпрямитель напряжения, во избежание поломок оборудования. Предназначен для питания функциональных модулей напряжениями постоянного тока, а также, дополнительно к функциям питания, осуществляет контроль первичной сети и формирует сигнал нарушения питания. Модуль рассчитан на эксплуатацию при температуре окружающей среды от 5 до 40 С, относительной влажности воздуха от 40 до 80% при температуре 25 С, атмосферном давлении от 84 до 107 кПа (от 630 до 800 мм рт. ст), при воздействии вибрации частотой до 25 Гц с амплитудой не более 0,1 мм. Технические данные: 1. Параметры питания: - напряжение сети однофазного переменного тока, В – 220; - отклонение напряжения, % - от плюс 10 до минус 15; - частота, Гц – 50; - ток, потребляемый от сети, А, не более - 0,4. 2. Масса, кг, не более - 1,67. 3. Габаритные размеры, мм, не более - 251*146*68. 4. Предельный кратковременный ток перегрузки -1,5 А. Ниже представлена принципиальная электрическая схема блока с выпрямителем напряжения. Рис 2.3 Электрическая схема источника питания. 2.3 Технические характеристики контроллеров и модулей ввода-вывода В качестве контроллера, используемого для создания данной системы, выберем контроллер фирмы Siemens, а именно контроллер серии S7-414-H. Выбор данного контроллера обусловлен его производительностью, объемом памяти, а также возможностью обмена информацией с преобразователями частоты. Кроме того, для повышения надежности работы всей системы автоматизации данный контроллер выполним резервированным. Рассмотрим основные черты, характеризующие данный программно-технический комплекс. Модули ввода-вывода будем использовать серии ET200M, фактически, это сигнальные модули контроллера S7-300. В данной серии существуют модули, предназначенные для ввода-вывода дискретных и аналоговых сигналов с различными электрическими и временными параметрами; Кроме модулей ввода/вывода можно выделить также следующие модули, которые выполняются в конструктиве S7-300 и могут использоваться в качестве удаленной периферии: - модули блоков питания (PS), обеспечивающие возможность питания контроллера от сети переменного тока напряжением 120/230В или от источника постоянного тока напряжением 24/48/60/110В; - коммуникационные процессоры (CP) для подключения к сетям PROFIBUS, Industrial Ethernet, AS-Interface или организации связи по PtP (point to point) интерфейсу; - функциональные модули (FM), способные самостоятельно решать задачи автоматического регулирования, позиционирования, обработки сигналов, модули снабжены встроенным микропроцессором и способны выполнять возложенные на них функции даже в случае отказа центрального процессора ПЛК; - интерфейсные модули (IM), обеспечивающие возможность подключения к базовому блоку (стойка с CPU) стоек расширения ввода-вывода, контроллеры SIMATIC S7-300 позволяют использовать в своем составе до 32 сигнальных и функциональных модулей, а также коммуникационных процессоров, распределенных по 4 монтажным стойкам, все модули работают с естественным охлаждением. Для всех вышеперечисленных модулей можно выделить следующие основные черты: - все модули легко устанавливаются на профильную рейку DIN и фиксируются на установленных местах винтом; - во все модули (кроме модулей блоков питания) встроены участки внутренней шины контроллера, соединение этих участков выполняется шинными соединителями, устанавливаемыми на тыльной стороне корпуса; - наличие фронтальных соединителей, позволяющих производить замену модулей без демонтажа всех внешних соединений и упрощающих выполнение операций подключения внешних цепей модулей; - подключение внешних цепей через фронтальные соединители с контактами по винт или пружинными контактами, механическое кодирование фронтальных соединителей, исключающее возможность возникновения ошибок при замене модулей; - применение модульных и гибких соединителей SITOP TOP Connect, существенно упрощающих монтаж шкафов управления; - единая для всех модулей глубина установки, все кабели располагаются в монтажных каналах модулей и закрываются защитными дверцами; - произвольный порядок размещения модулей в монтажных стойках, фиксированные места должны занимать только блоки питания, центральные процессоры и интерфейсные модули. Большое количество модулей программируемого контроллера S7-300 оснащено набором встроенных интеллектуальных функций, существенно упрощающих эксплуатацию системы управления: - мониторинг сбора сигналов (диагностика); - мониторинг сигналов аппаратных прерываний. Рис. 2.4. Монтаж модулей на профильной шине Диагностика используется для определения работоспособности модулей ввода дискретных и аналоговых сигналов. Для передачи диагностической информации применяются маскируемые и не маскируемые сообщения: - маскируемые диагностические сообщения, которые могут пересылаться только в том случае, если это разрешено соответствующими параметрами настройки; - не маскируемые диагностические сообщения, пересылка которых производится независимо от соответствующих параметров настройки. Если диагностическое сообщение готово к передаче (например, сообщение об отсутствии напряжения питания датчика), то модуль генерирует диагностическое прерывание (для маскируемых сообщений только в случае определения параметров разрешения передачи). Центральный процессор прерывает выполнение программы пользователя или задач с более низким приоритетом и вызывает соответствующий организационный блок (OB 82). В зависимости от типа модуля диагностические сообщения могут носить различный характер. Более подробно программная часть системы управления будет описана ниже. Контроллеры SIMATIC S7-400 обладают широкими коммуникационными возможностями: - коммуникационные процессоры для подключения к сетям PROFIBUS (с встроенным оптическим или электрическим интерфейсом), Industrial Ethernet и AS-интерфейсу; - коммуникационные процессоры PPI для использования последовательных (RS 232, TTY, RS 422/ RS 485) каналов связи; - MPI интерфейс, встроенный в каждый центральный процессор и позволяющий создавать простые и недорогие сетевые решения для связи с программаторами, персональными ЭВМ, устройствами человеко-машинного интерфейса, другими системами SIMATIC S7/ C7/ WinAC, параметры конфигурации MPI интерфейса могут быть определены встроенными средствами STEP 7; - центральные процессоры с встроенным интерфейсом PROFIBUS-DP. Подключение контроллеров SIMATIC S7-400 к сети PROFIBUS-DP может производиться с помощью коммуникационного процессора или через встроенный интерфейс центрального процессора. Центральные процессоры с встроенным интерфейсом PROFIBUS-DP позволяют создавать распределенные системы автоматического управления со скоростным обменом данными между ее компонентами через сеть PROFIBUS-DP. В такой системе центральный процессор способен выполнять функции ведущего или ведомого DP-устройства. Обращение к входам-выходам устройств распределенного ввода-вывода производится теми же способами, что и к входам-выходам системы локального ввода-вывода (адреса удаленных модулей отображаются в соответствующих строках в закладке Hardware). Рассмотрим основные модули ввода/вывода, которые будут использоваться в данной работе. Цифровой модуль ввода SM 321 Цифровой модуль ввода SM 321; DI 16 x 24 VDC отличается следующими свойствами: 16 входов, потенциальная развязка группами по 16 каналов. Номинальное входное напряжение 24 В пост. тока. Пригоден для переключателей и 2/3/4–проводных BERO (датчиков приближения). Схема подключения и принципиальная схема SM 321; DI 16 x 24 VDC Рис. 2.5. Схема подключения входных сигналов Таблица 5 Технические данные SM 321 Размеры и вес Размеры Ш x H x D(в миллиметрах) 40 x 125 x 117 Вес ок. 200 г Особые данные модуля Поддержка режима тактовой синхронизации Нет Количество входов 16 Длина кабеля • неэкранированного макс. 600 м • экранированного макс. 1000 м Напряжения, токи, потенциалы Количество входов, которыми можно управлять одновременно • горизонтальный монтаж до 60 °C 16 • вертикальный монтаж до 40 °C 16 Гальваническая развязка • между каналами и задней шиной Да Допустимая разность потенциалов = 75 В / ~ 60 В • между различными цепями тока Изоляция проверена при 500 В пост. тока Потребление тока • из задней шины макс. 10 мА Мощность потерь модуля тип. 3,5 Вт Состояние, прерывания, диагностика Индикация состояния Зеленый светодиод на каждом канале Прерывания Отсутствуют Диагностические функции Отсутствуют Цифровой модуль вывода SM 322 Рис. 2.6. Схема подключения выходных сигналов Цифровой модуль вывода SM 322; DO 16 x 24 VDC/0.5 A отличается следующими свойствами: 16 выходов, потенциальная развязка группами по 8 выходной ток 0,5 A, номинальное напряжение на нагрузке 24 В пост. тока. Пригоден для электромагнитных клапанов, контакторов постоянного тока и сигнальных ламп. Таблица 6 Технические данные SM 322 Размеры и вес Размеры Ш x В x Г (в миллиметрах) 40 x 125 x 117 Вес ок. 190 г Особые данные модуля Поддерживает режим тактовой синхронизации Нет Количество выходов 16 Длина кабеля • неэкранированного макс. 600 м • экранированного макс. 1000 м Напряжения, токи, потенциалы Номинальное напряжение на нагрузке L+ 24 В пост. тока Суммарный ток выходов (на группу) • горизонтальный монтаж до 40 °C макс. 4 A до 60 °C макс. 3 A • вертикальный монтаж до 40 °C макс. 2 A Гальваническая развязка • между каналами и задней шиной Да • между каналами группами по Да 8 Допустимая разность потенциалов • между различными цепями тока = 75 В / ∼ 60 В Изоляция проверена при 500 В пост. тока Потребление тока • из задней шины макс. 80 мА • из источника питания нагрузки L + (без нагрузки) макс. 80 мА Мощность потерь модуля тип. 4.9 Вт Состояние, прерывания, диагностика Индикация состояния Зеленый светодиод на каждом канале Прерывания Отсутствуют Диагностические функции Отсутствуют Технические данные SM 331 Рис. 2.7. Схема подключения входных аналоговых сигналов Таблица 7 Размеры и вес Размеры Ш x В x Г (в миллиметрах) 40 x 125 x 117 Вес ок. 250 г Особые данные модуля Поддерживает режим тактовой синхронизации Нет Количество входов 8 Длина кабеля • экранированного макс. 200 м Напряжения, токи, потенциалы Потребление тока из задней шины 24 В пост. тока Гальваническая развязка • между каналами и задней шиной Да • между каналами нет Допустимая разность потенциалов • между входами = 2 В Изоляция проверена при 500 В пост. тока Потребление тока • из задней шины макс. 90 мА Мощность потерь модуля тип. 0.4 Вт Состояние, прерывания, диагностика Прерывания Отсутствуют Диагностические функции Отсутствуют Данные модули ввода/вывода, так же как центральный процессорный модуль, устанавливаются на специализированную профильную шину. Соединение модулей между собой осуществляется при помощи стандартных П-образных соединителей, входящих в комплект поставки каждого модуля. Подключение физических сигналов к модулям ввода осуществляется посредством фронт-штекеров. Кроме того, данная система должна включать блоки питания 220в переменного тока/24В постоянного тока, как для питания процессорного модуля и электроники модулей ввода/вывода, так и запитывания входных и выходных цепей. 2.4 Расчет усилителя мощности Выбор схемы усилителя. Выбираем простейший усилитель мощности, имеющий 4 каскада усиления и отрицательную обратную связь. Сигналы, передающиеся от микроконтроллера к исполнительному устройству на выходе модуля ВЫВОД 24 – дифференциальные. Рис. 2.8 Схема усилителя Процесс усиления электрического сигнала происходит за счет мощности, потребляемой от источника питания. Часть мощности Ро в усилителе преобразуется в мощность Р2, т.е. в мощность, выделяемую в нагрузке. Для преобразования мощности Ро в мощность Р2 затрачивается мощность Р1, т.е. мощность источника сигнала. Таким образом, усиление – процесс увеличения мощности источника сигнала. Разработка и расчет оконечного каскада усилителя мощности Выберем в качестве оконечного каскада двухтактный, бестрансформаторный, каскад на составных биполярных транзисторах, включенных по схеме с общим коллектором. Это позволит нам осуществить непосредственную связь с нагрузкой, а значит, обойтись без громоздких трансформаторов и разделительных конденсаторов. А т.к. последние являются частотно-зависимыми элементами, то их отсутствие существенно расширит полосу пропускания усилителя. Отсутствие частотно-зависимых элементов позволяет вводить глубокие обратные связи по постоянному току, что улучшает характеристики усилителя. Выберем схему построения оконечного каскада. Для повышения КПД транзисторы оконечного каскада используют в режиме класса В. Тогда оконечный каскад будет состоять из двух симметричных плеч, каждое из которых будет работать параллельно и в противофазе друг другу на общую нагрузку (Рисунок 13). Однако при этом существенно увеличиваются нелинейные искажения. Поэтому выходные каскады обычно используют в режиме АВ (при этом в принципиальную схему добавляется цепь смещения), обеспечивая высокий КПД и малые нелинейные искажения. Такие схемы выполняют на комплиментарных транзисторах. При значительной мощности выходного сигнала (более 5 Вт) или при слишком большом коэффициенте гармоник может возникнуть ситуация, когда для предоконечного каскада тоже может потребоваться режим АВ. В этом случае оконечный каскад выполняют на составных транзисторах. Рис. 2.9 Схема выходного каскада Выбор 1ой пары транзисторов. Первая пара транзисторов составляет свой каскад. Он состоит из двух комплиментарных транзисторов V1 и V2, работающих на общую нагрузку . По своим усилительным свойствам транзисторы V1 и V2 должны быть идентичны. В схеме (Рисунок 14) транзисторы V1 и V2 включены с ОК. Напряжения источников питания равны между собой . При положительных входных сигналах транзистор V1 работает в активном режиме и усиливает входной сигнал, а транзистор V2 заперт. При отрицательных входных напряжениях - наоборот. Таким образом, транзисторы работают в активном режиме попеременно, каждый в течение одного полупериода входного напряжения. При оба транзистора заперты. Рис. 2.10 Схема оконечного каскада а) рассчитаем амплитуду выходного питания U = (2Pн Rн )1/2; (1) = =15,49 В; б) выберем напряжение питания Eп = Uнм + Uост= 15,49 + 6 = 21,49 , следовательно Eп = 21 В (2) Uост= 6 В; в) рассчитываем мощность, рассеиваемую на одном транзисторе = 6,2 Вт ; (3) г) ток нагрузки А, то есть Ikm = 1,94 A; (4) д) исходя из рассчитанных данных выбираем пару транзисторов Выбираем транзисторы КТ-818В и КТ-819В. КТ-818В - это кремневые мезаэпитаксиально – планарные p-n-p-транзисторы предназначены для применения в ключевых и линейных схемах. Корпус пластмассовый с гибкими выводами или металлический, масса не более 15 г. КТ-819В - это кремневые мезаэпитаксиально – планарные n-p-n-транзисторы предназначены для применения в ключевых и линейных схемах, узлах, блоках аппаратуры. Корпус пластмассовый с гибкими выводами, масса не более 2,5 г. или металлостеклянный, масса не более 15 г. Выбор 2ой пары транзисторов. Для второй пары транзисторов составного каскада входные параметры первого являются выходными, то есть для выбора транзисторов используем следующие данные: Eп = Uнм + Uост= 14,84 + 6 = 20,84 , следовательно Eп = 21 В Uост= 6 В; = 0,15 Вт , то есть Ikm = 50 мA; Исходя из рассчитанных данных выбираем пару транзисторов: КТ-629А и КТ-630А. КТ-629А - это кремниевые эпитаксиально–планарные p-n-p-транзисторы предназначены для использования в быстродействующих импульсных и других неремонтируемых гибридных схемах, микромодулях, узлах и блоках, имеющих герметичную защиту от действия солнечного света, влаги и так далее, для аппаратуры широкого применения. Оформление бес корпусное, на диэлектрической подложке. Масса не более 0,02 г. КТ-630А - это кремневые планарные n-p-n-транзисторы используются в быстродействующих импульсных и других схемах. Корпус металлический, герметичный, с гибкими выводами, масса не более 2 г. Разработка и расчет предоконечного каскада При необходимости получения больших выходных токов существенно возрастает ток, потребляемый базовыми цепями транзисторов УМ от предварительного каскада. Предварительные каскады, как правило, являются усилителями напряжения, работающими в режиме класса А. Предоконечный каскад предназначен для согласования оконечного каскада на составных комплиментарных транзисторах, работающих в режиме класса АВ, с выходом ОУ А2. Предоконечный каскад построен на биполярном транзисторе n-p-n типа, который включен по схеме с ОЭ в цепь смещения оконечного каскада вместо резистора R4 (Рисунок 15). Рис. 2.11 Принципиальная схема предоконечного и оконечного каскадов Выбор типа транзистора. Для предоконечного каскада входные параметры второй пары составного каскада являются выходными, то есть для выбора транзисторов используем следующие данные: ; =14,97В. , , Eк =2Еп ,следовательно Eк = 42 В ; (5) Исходя из рассчитанных данных выбираем транзистор: это КТ-601А - кремневые планарные n-p-n-транзисторы предназначенные для работы в радиовещательных и телевизионных приемниках, в усилительной аппаратуре и других устройствах. Корпус герметичный, металлический, с гибкими выводами, пластмассовый. Масса транзистора не более 2 г. Разработка и расчет промежуточного каскада Данный каскад будет построен на операционном усилителе. Операционный усилитель – это усилитель постоянного тока, имеющий высокий коэффициент усиления порядка несколько сотен единиц. В данном каскаде применяем масштабирующий операционный усилитель с инвертируемым сигналом. Рис. 2.12 Принципиальная схема промежуточного каскада Основной функцией этого усилителя умножение входного сигнала на постоянный коэффициент. В данной схеме операционный усилитель охвачен отрицательной параллельной обратной связью по напряжению. Выбор операционного усилителя. Основные параметры операционного усилителя: 1. КU - коэффициент усиления по постоянному току, чем больше коэффициент, тем ближе операционный усилитель к идеальному. 2. Rвх – входное сопротивление. 3. Rвых – выходное сопротивление. 4. - напряжение питания, - около 5%. 5. Uвыхm – максимальная амплитуда выходного сигнала 80 %Еп . 6. R н,min (1…2) кОм. 7. I н,max = (5…10) мА. 8. fв – верхняя граничная частота. 10. есм – напряжение смещения нуля. 11. Iвх1, Iвх2. Выберем операционный усилитель К140УД6, у которого Uсм = 10 мВ, Iвх= 30 нА, ΔIвх = 10 нА, Uп= (5-17)В, Iпот= 4 мА, Rвх=1МОм, кос.сф.=70 Дб, Rн,min =1кОм. Расчет масштабирующего усилителя с инвертированием сигнала. При анализе усилительных свойств схемы на операционном усилителе будем считать, что ; (6) (7) так как , откуда получим (8) Также , из предыдущего каскада имеем Uвых = 0,04 В, а Uвх = 5 мВ, откуда Теперь рассчитаем R1 и R2: Зададимся произвольным значением R2 при условии R2>>Rнmin , Так как Rнmin = 1 кОм , откуда С другой стороны >>I0 , >>103 I0 Пусть I0 = 0,001 мкА, тогда >> 1 мкА, следовательно =10 мкА , R2<< Rвх, Rвх= 1МОм , так как к0→∞, то Разработка и расчет входного каскада Данный каскад также будет построен на операционном усилителе. Только в отличие от предыдущего каскада мы выбираем масштабирующий усилитель без инвертирующего сигнала. Это каскад согласовывает высокое входное сопротивление сигнала с каскадом, обладающим более меньшим входным сопротивлением. Операционный усилитель охвачен отрицательной последовательной обратной связью по напряжению. Рис. 2.13 Принципиальная схема входного каскада Выбор операционного усилителя. Выберем операционный усилитель К140УД6, у которого Uсм = 10 мВ, Iвх= 30 нА, ΔIвх = 10 нА, Uп= (5-17)В, Iпот= 4 мА, Rвх=1МОм, кос.сф.=70 Дб, Rн,min =1кОм. Расчет масштабирующего усилителя без инвертирования сигнала. При анализе усилительных свойств схемы на операционном усилителе будем считать, что ; (9) (10) так как , откуда получим . (11) Также , из предыдущего каскада имеем Uвых = 5 мВ, а Uвх = 5 мВ, откуда Теперь рассчитаем R1 и R2: Зададимся произвольным значением R2 при условии R2>>Rнmin , Так как Rнmin = 1 кОм , откуда С другой стороны >>I0 , >>103 I0 Пусть I0 = 0,001 мкА, тогда >> 1 мкА, следовательно, =10 мкА , R2<< Rвх, Rвх= 1МОм , так как к0→∞, то Ниже представлена схема усилителя. Рис. 2.14 Схема усилителя 3. Специальная часть 3.1 Среда конфигурирования контроллера STEP 7 – это базовый пакет программ, включающий в свой состав весь спектр инструментальных средств, необходимых для программирования и эксплуатации систем управления, построенных на основе систем автоматизации SIMATIC S7. Отличительной особенностью пакета STEP 7 является возможность разработки комплексных проектов автоматизации, базирующихся на использовании множества программируемых контроллеров, промышленных компьютеров, устройств и систем человеко-машинного интерфейса, устройств распределенного ввода-вывода, сетевых структур промышленной связи. Ограничения на разработку таких проектов накладываются только функциональными возможностями программаторов или компьютеров, на которых инсталлирован STEP 7. Инструментальные средства STEP 7 позволяют выполнять: - конфигурирование и определение параметров настройки аппаратуры; - конфигурирование систем промышленной связи и настройку параметров передачи данных; - программирование, тестирование, отладку и запуск программ отдельных систем автоматизации, а также их локальное или дистанционное обслуживание; - документирование и архивирование данных проекта; - функции оперативного управления и диагностирования аппаратуры. Все перечисленные функции поддерживаются мощной системой интерактивной помощи. STEP 7 входит в комплект поставки всех программаторов семейства SIMATIC PG. Он может поставляться также в виде самостоятельного пакета программ для персональных компьютеров, работающих под управлением операционных систем Windows XP/Vista/Win7. Для возможности подключения программируемых контроллеров компьютер должен быть оснащен MPI картой (например, типа CP-5613) или PC адаптером и соединительным кабелем. STEP 7 обеспечивает параллельное выполнение работ по одному проекту несколькими разработчиками. Единственным ограничением при этом является невозможность одновременной записи данных несколькими разработчиками. STEP 7 объединяет все файлы программ пользователя и все файлы данных в блоки. В пределах одного блока могут быть использованы другие блоки. Механизм их вызова напоминает вызов подпрограмм. Это позволяет улучшать структуру программы пользователя, повышать их наглядность, обеспечить удобство их модификации, перенос готовых блоков из одной программы в другую. В составе программ STEP 7 могут быть использованы организационные, функциональные, системные блоки, функции, блоки данных. Организационные блоки (ОВ), которые осуществляют управление ходом выполнения программы, в соответствии с рис. 5. В зависимости от способа запуска (циклическое выполнение, запуск по временному прерыванию, запуск по событию и т.д.) организационные блоки разделяются на классы, имеющие различные уровни приоритета. Рис. 3.1. Управление ходом выполнения программы Функциональные блоки (FB) содержат отдельные части программы пользователя. Выполнение функциональных блоков сопровождается обработкой различных данных. Эти данные, внутренние переменные и результаты обработки загружаются в выделенный для этой цели блок данных IDB. Управление данными, хранящимися в IDB, осуществляет операционная система программируемого контроллера. Для каждого функционального (FB) и системного функционального (SFB) блока операционная система контроллера создает служебный блок данных IDB (Instance-data Block). IDB генерируются автоматически после компиляции FB и SFB. Доступ к данным, хранящимся в IDB, может быть осуществлен из программы пользователя или из системы человекомашинного интерфейса. Функции (FC) – блоки, которые содержат программы вычисления используемых функций. Каждая функция формирует фиксированную выходную величину на основе получаемых входных данных. К моменту вызова функции все ее входные данные должны быть определены. Такой механизм позволяет использовать функции без блоков данных. Блоки данных (DB) предназначены для хранения данных пользователя. В отличие от данных, хранящихся в IDB и используемых одним блоком FB или SFB, глобальные данные, хранящиеся в DB, могут использоваться любым из программных модулей. В DB могут храниться данные, имеющие элементарный или структурный тип. Примерами данных элементарного типа могут служить данные логического (BOOL), целого (INTEGER), действительного (REAL) или других типов. Данные структурного типа формируются из данных элементарного типа. Для обращения к данным, записанным в DB, может использоваться символьная адресация. Системные функциональные блоки (SFB) – это функциональные блоки, встроенные в операционную систему центрального процессора (например, SEND/ RECEIVE). Эти блоки не занимают места в памяти программ контроллера, но требуют использования IDB. Системные функции (SFC) – это функции, встроенные в операционную систему контроллера. Например, функции таймеров, счетчиков, передачи блоков данных и т.д. Системные блоки данных (SDB) – это блоки для хранения данных операционной системы центрального процессора. К этим данным относятся параметры настройки системы и отдельных модулей (аппаратных модулей). Редакторы стандартных языков обеспечивают полную графическую поддержку программирования со следующими характеристиками: - простое и интуитивное использование, создание программы поддерживается дружественным пользователю интерфейсом и позволяет использовать стандартные механизмы работы с Windows; - библиотеки заранее подготовленных сложных функций (например, ПИД регулирования) и разработанных пользователем решений. STEP 7 оснащен исчерпывающим набором инструкций, позволяющим легко и просто решать любые задачи автоматического управления. Для удобства контроля программного обеспечения необходимо произвести взаимосвязь логических сигналов и их физических каналов. Это достигается путем создания специального файла в среде Step7 под названием Symbol Table. Рассмотрим пример обозначения входов и выходов по стандарту МЭК 61131-3. На рисунке 3.2 представлены названия 19 каналов дискретного ввода по стандарту МЭК. Рассмотрим подробно принцип маркировки каналов. При создании конфигурации аппаратного обеспечения контроллера каждому модулю назначается определенная область входных и выходных данных. Размер выделяемой области определяется типом модуля ввода/вывода и количеством выходных/выходных каналов, которые данный модуль может поддерживать. Рассмотрим привязку каналов к модулю дискретного ввода типа S7-321. Рис. 3.2. Пример привязки физических каналов и логических каналов Рис. 3.3. Страница аппаратного обеспечения (Hardware) Например, запись I12.0 означает, что первый канал модуля дискретного ввода, которому в области данных входов/выходов назначен адрес 12. Переменные, назначаемые на входные/выходные каналы дискретных модулей имеют тип переменной BOOL. Это обозначает, что канал может принимать значение «0» или «1». Выходные каналы дискретных модулей маркируются по такому же принципу, только символ I (input) в записи адреса меняется на Q (output). Для аналоговых модулей есть возможность установки приема различных аналоговых сигналов. Это делается намеренно для расширения функциональных возможностей по использованию различных типов датчиков. Пример назначения различных типов принимаемого сигнала показан на рис. 3.4. Рис. 3.4. Установка типа принимаемого входного аналогового сигнала В данном проекте мы используем датчики только с выходным сигналом 4-20 мА. Для создания (а затем для дальнейшего) выполнения программы в котроллере необходимо выполнить следующие действия:  В среде Step7 выбрать раздел S7Program  Войти в папку Blocks  Войти в программный блок OB1. Именно в этом программной блоке и осуществляется циклическое выполнение программы пользователя. Все подпрограммы, функциональные с блоками данных вызываются именно из этого блока. При открытии этого бота в первый раз необходимо выбрать язык в стандарте МЭКR 61131, на котором будет создаваться программа. Это не критичный выбор, т.к. во время работы пользователю дается возможность смены используемого языка. Программа пользователя будет автоматически меняться из одного языка в другой. Рассмотрим пример программного блока, созданного для управления задвижкой. Данный блок состоит из четырех сетей». Приведем некоторые пояснения к синтаксису языков, используемых в программе. Переменные М – это внутренние двоичные переменные программы, в данной среде они группируются по байтам, и в синтаксисе переменной первые два цифры означают номер байта памяти контроллера, а цифра после запятой – номер бита в байте. Переменные типа I – физические двоичные входа. Под дискретные сигналы (замыкание/размыкание контактов реле, срабатывание датчика протечки задействовано по 1 биту). Символом Q обозначаются выходные переменные, т.е. переменные, по которым происходит управление катушками реле, сигнализацией светодиодных ламп и т.п. Аналогичным образом организуется и обмен между контроллером и прочими устройствами по шине Profibus – доступ к внутренней памяти этих устройств осуществляется посредством адресации к таким переменным, как PIW, PQW (входная и выходная информации соответственно). T – переменная типа таймер (задержка включения/отключения) Саму программу можно представить в любом из трех языков: лестничной логики, функциональных блоко, языке типа ассемблера. Все эти языки программирования стандартны в соответствии со стандартом МЭК61131-3. Приведем различные виды отображения этих языков для одного и того же фрагмента программы: Рис. 3.5. Формирование гарантированного «0» Рис. 3.6. Формирование гарантированной «1» Для обмена информацией между преобразователем частоты, преобразователем скорости для ДПТ и контроллерами будем использовать шину Profibus-DP. Для этого в преобразователь Simoreg установим карту Profibus типа CBP-2. 3.2 Краткая характеристика средств ЧМИ Для создания человеко-машинного интерфейса будем использовать персональный компьютер. Концепция SCADA (Supervisory Control And Data Acquisition - диспетчерское управление и сбор данных) предопределена всем ходом развития систем управления и результатами научно-технического прогресса. Применение SCADA-технологий позволяет достичь высокого уровня автоматизации в решении задач разработки систем управления, сбора, обработки, передачи, хранения и отображения информации. Дружественность человеко-машинного интерфейса (HMI/MMI - Human Machine Interface), предоставляемого SCADA-системами, полнота и наглядность представляемой на экране информации, доступность «рычагов» управления, удобство пользования подсказками и справочной системой и т. д. повышают эффективность взаимодействия диспетчера с системой и сводят к минимуму его критические ошибки при управлении. Выбор SCADA-системы представляет собой достаточно трудную задачу, аналогичную принятию решений в условиях многокритериальное, усложненную невозможностью количественной оценки ряда критериев из-за недостатка информации. Основные возможности и средства, присущие всем системам SCADA: - автоматизированная разработка, дающая возможность создания ПО системы - автоматизации без реального программирования; - средства исполнения прикладных программ; - сбор первичной информации от устройств нижнего уровня; - обработка первичной информации; - регистрация тревог и исторических данных; - хранение информации с возможностью ее постобработки (как правило; - реализуется через интерфейсы к наиболее популярным базам данных); - визуализация информации в виде мнемосхем, графиков; - возможность работы прикладной системы с наборами параметров; - рассматриваемых как «единое целое» (recipe или «установки»). Для разработки системы диспетчерского управления технологическими процессами воспользуемся программным комплексом WinCC Flexible. Прежде всего, это единая интегрированная с контроллером среда разработки операторского интерфейса. Из-за большого круга инсталляций на различных промышленных объектах России отсутствует проблема с русификацией. Масштаб систем автоматизации, создаваемых в WinCC Flexible, может быть любым – от автономно работающих управляющих контроллеров и рабочих мест операторов (АРМ), до территориально распределенных систем управления, включающих десятки контроллеров и АРМ, обменивающихся данными с использованием различных коммуникаций – локальная сеть, интранет/интернет, последовательные шины на основе RS-232/485, выделенные и коммутируемые телефонные линии, радиоканал и GSM-сети. Диспетчер в многоуровневой автоматизированной системе управления технологическими процессами получает информацию с монитора ЭВМ или с электронной системы отображения информации и воздействует на объекты, находящиеся от него на значительном расстоянии, с помощью телекоммуникационных систем, контроллеров, интеллектуальных исполнительных механизмов. Создание проекта АСУ осуществляется в единой интегрированной среде разработки (ИС) WinCC Flexible, работающей под управлением операционной системы MS Windows. Разрабатываемый проект представляется в виде дерева компонентов. Программное обеспечение системы создается в двух средах разработки: Step7 – для разработки прикладного программного обеспечения контроллера, WinCС Flexible – для создания операторского интерфейса. Так как оба программных пакета выполнены одним производителем, то это очень удобно с точки зрения организации единого доступа к переменным программы пользователя. 3.3 Алгоритм работы системы Вкратце алгоритм работы можно представить следующим образом: 1. Анализ текущего состояния системы, нет ли ошибок и сигнализации от внутренней самодиагностики 2. Проверка наличия блокировок 3. Задание необходимой скорости вращения, проверка достижения заданной скорости. 4. Контроль за значением тока для предотвращения выхода двигателя из строя 4. Экономическая часть 4.1 Планирование разработки ПС с построением графика Как правило, при проектировании системы управления технологическим объектом необходимо рассмотреть все возможные способы ее реализации и выбрать наиболее эффективный. Однако, как показал обзор литературных источников, проведенный в начале данной работы, подобной системы сбора и анализа информации не существует на рынке. Тем не менее, достаточно просто можно определить затраты на разработку подобной системы. Прежде всего, следует иметь в виду, что порядок разработки автоматизированных систем сбора и анализа информации должен соответствовать требованиям нормативных документов. На сегодняшний день на территории РФ действуют ГОСТ серии 34, регламентирующие требования к стадиям, порядку создания и к составу документации, выпускаемой при создании автоматизированной системы. Расчет затрат на этапе проектирования Для расчета затрат на этапе проектирования определим продолжительность каждой работы (начиная с составления технического задания (ТЗ) и до оформления документации включительно. Продолжительность работ рассчитаем по экспертным оценкам по формуле: to = (3tmin +2tmax)/5 (4.1) где to - ожидаемая длительность работы: tmin и tmax - соответственно наименьшая и наибольшая, по мнению эксперта длительность работы. Полученные значения округляем в большую сторону (для создания резерва времени). Далее, принимая во внимание количество работников, необходимых на выполнение каждого из этапов работ, и определим продолжительность работ в календарных днях. Продолжительность каждого вида работ в календарных днях (Ti) определяется по формуле (4.2), в днях: , (4.2) где: ti – трудоемкость работ, человек-дней; Чi – численность исполнителей, человек; Kвых – коэффициент, учитывающий выходные и праздничные дни: где: Ккал. – число календарных дней; Краб. – рабочие дни; Kвых=1,3. Все расчеты сведем в таблицу 4.1. Таблица 4.1 Расчет трудоемкости и продолжительности работ по созданию программного и математического обеспечения Наименование работы Трудоемкость, чел. дни Количество работников, чел. Продолжит. работ календ. дни tmin tmax ti Чi Ti 1. Разработка ТЗ (подбор литературы; сбор исходных данных; определение требований к системе) 2 4 3 3 1,3 2. Разработка эскизного проекта 5 14 9 3 3,9 3. Разработка технического проекта 7 18 12 2 7,8 4. Разработка рабочего проекта 7 18 12 2 7,8 5. Внедрение 14 30 21 5 5,46 Общая трудоемкость разработки 57 26,26 Таким образом, общая продолжительность работ составит порядка 27 дней. Данный срок будет выдержан при четком выполнении плана работ и правильной организации процесса проектирования, позволяющим выполнять создание проектной документации на разных этапах создания Системы параллельно. В качестве инструмента планирования работ используем ленточный график. Ленточный график позволяет наглядно представить логическую последовательность и взаимосвязь отдельных работ, срок начала и срок окончания работ. Он представляет собой таблицу, где перечислены наименования стадий разработки и видов работ, длительность выполнения каждого вида работ. Продолжением таблицы является график, отражающий продолжительность каждого вида работ в виде отрезков времени, которые располагаются в соответствии с последовательностью выполнения работ. Ленточный график разработки программного и математического обеспечения, построенный по данным таблицы 4.2, приведен на рисунке 4.1. Расчет сметы затрат на разработку программных средств Сметная стоимость проектирования и внедрения программы включает в себя следующие затраты, определяемые по формуле (4.3): Спр=Сосн + Сдоп + Ссоц + См + Смаш.вр + Сн, (4.3) где: Спр – стоимость разработки ПО; Сосн – основная заработная плата исполнителей; Сдоп – дополнительная заработная плата исполнителей, учитывающая потери времени на отпуска и болезни (принимается в среднем 10% от основной заработной платы); Ссоц – отчисления во внебюджетные фонды государственного социального страхования (пенсионный фонд, фонд обязательного медицинского страхования, фонд социального страхования), рассчитываются как 0,26% от основной и дополнительной заработной платы; См – затраты на используемые материалы; Смаш.вр – стоимость машинного времени. Сн – накладные расходы включают затраты на управление, уборку, ремонт, электроэнергию, отопление и др. (принимаются в размере 60% от основной и дополнительной заработной платы); № Наименование этапа февраль Март 1-3 4-12 13-24 25-36 37-57 1 Разработка ТЗ (подбор литературы; сбор исходных данных; определение требований к системе) 2 Разработка эскизного проекта (разработка предварительных проектных решений по системе и ее частям) 3 Разработка технического проекта (Разработка документации на автоматизированную систему; разработка и оформление документации на поставку изделий для комплектования Системы; разработка заданий на проектирование в смежных частях проекта объекта автоматизации) 4 Разработка рабочего проекта (Разработка рабочей документации на систему и ее части; разработка и адаптация программ) 5 Внедрение (подготовка персонала; пусконаладочные работы; проведение предварительных испытаний, опытной эксплуатации) Рис.4.1.Ленточный график Основная заработная плата исполнителей На статью «Заработная плата» относят заработную плату научных, инженерно-технических и других работников, непосредственно участвующих в разработке ПО. Расчет ведется по формуле (4.4): Зисп = Зср * Т, (4.4) Где Зисп – заработная плата исполнителей (руб.); Зср – средняя тарифная ставка работника организации разработчика ПО (руб./чел./дни); Т – трудоемкость разработки ПО (чел.дни). Зср определяется по формуле (5.5): Зср = С / Фмес, (4.5) где: С – зарплата труда на текущий момент времени (руб./мес.); Фмес – месячный фонд рабочего времени исполнителя (дни). Затраты на статью «Заработной платы» приведены в таблице 4.3. Таблица 4.3 Затраты на заработную плату № Исполнитель Оклад, руб./мес. Оклад, руб./день Трудоемкость, чел.дни Сумма, руб. 1 Инженер-проектировщик АСУТП 14500 777 57 44289 Общая основная заработная плата исполнителей, Сосн 57 44289 Дополнительная заработная плата Дополнительная заработная плата на период разработки ПО рассчитывается относительно основной и составляет 10% от ее величины: Сдоп = Сосн * 0,1 = 4428,9 (руб.) Расчет отчислений на социальное страхование Социальное страхование включает отчисления во все внебюджетные фонды, в том числе пенсионный, занятости, обязательного медицинского страхования, социального страхования. Отчисления на социальное страхование рассчитываются относительно выплаченной заработной платы (суммы основной и дополнительной заработной платы). Составляют 26%: Ссоц = (Сдоп + Сосн) * 0,26 (4.6) Ссоц = (44289 + 4428,9) * 0,26 = 12666,65 (руб.) Расчет расходов на материалы На эту статью относят все затраты на магнитные носители данных, бумагу, для печатных устройств, канцтовары и др. Затраты по ним определяются по экспертным оценкам. Расчет расходов на материалы приведен в таблице 4.4. Таблица 4.4 № Материалы Количество, штуки Стоимость, рубли 1 Бумага писчая, листов 1000 400 2 Картридж для принтера, шт 1 900 3 Другие канцтовары - 700 Общая стоимость материалов, См 2000 Накладные расходы На статью «Накладные расходы» относят расходы, связанные с управлением и организацией работ. Накладные расходы рассчитываются относительно основной заработной платы. Величина накладных расходов принимается равной 60% от основной зарплаты исполнителей. Формула расчета (4.7): Сн = Сосн * К, (4.7) Где Сн – накладные расходы (руб.); Сосн – основная заработная плата исполнителей (руб.); К – коэффициент учета накладных расходов (К = 0,6) Сн = 59829 * 0,6 = 35897,4 (руб.) Расчет стоимости машинного времени Затраты на машинное время, необходимое для разработки ПО, расходы на приобретение и подготовку материалов научно-технической информации, расходы на использование средствами связи. Расчет затрат на машинное время осуществляется по формуле (4.8): Смаш.вр = Кмаш.вр * Змаш.вр (4.8) где: Кмаш.вр – тарифная стоимость одного часа машинного времени (Кмаш.вр=50 руб./ч.) Змаш.вр – машинное время, используемое не проведение работ. Необходимое количество машинного времени для реализации проекта по разработке программы рассчитывается по формуле: Змаш.вр = ti * Tсм * Tср.маш, (4.9) где: ti – трудоемкость работ, чел.дней; Tсм – продолжительность рабочей смены (При пятидневной рабочей неделе Tсм = 8 ч.); Tср.маш – средний коэффициент использования машинного времени (Tср.маш = 0,7). Тогда: Змаш.вр = 57 * 8 * 0,7 = 319,2 (ч..) Стоимость машинного времени составит: Смаш.вр = 50 * 319,2 = 15960 (руб.) Результаты расчета затрат на проектирование программного обеспечения сведены в таблице 4.5. Таблица 4.5 Смета затрат на разработку и внедрение программы № Наименование статей Обозначение Сумма, руб. В % к итогу 1 Основная заработная плата Сосн 44289 41,81 2 Дополнительная заработная плата Сдоп 4428,9 4,18 3 Отчисления на социальные нужды Ссоц 12666,654 11,96 4 Материалы Смат 2000 1,89 5 Накладные расходы Сн 26573,4 25,09 6 Стоимость машинного времени Смаш.вр 15960 15,07 Итого: Спр 105917,95 100 Таким образом, себестоимость разработки составляет 105917,95 руб. Данное программное обеспечение может быть реализована на рынке. При расчетном количестве реализованных систем (n=3), оптовая цена программы (Цопт) может быть рассчитана по формуле: Цопт = ; где: Спр – себестоимость разработки программы; П – прибыль, определяется по формуле: ; Где Ур – средний уровень рентабельности (Ур = 20%). Таким образом, оптовая цена программы составит: Цопт = 42367,18 (руб.) Отпускная цена реализации программы потребителям (Цотп), рассчитывается по формуле: Где НДС – налог на добавленную стоимость, рассчитывается в соответствии с действующей ставкой этого налога – 18% от оптовой цены программы. Цопт = 49993,27 (руб.) Таким образом, отпускная цена программы составит 42367,18 руб., в том числе НДС – 49993,27 руб. 5. Безопасность жизнедеятельности и охрана окружающей среды 5.1 Безопасность жизнедеятельности 5.1.1 Анализ опасных и вредных факторов, действующих на разработчика. Опасные и вредные производственные факторы по природе возникновения разделяют на следующие категории: физические; химические; психофизиологические; биологические. В помещении на оператора могут негативно действовать следующие физические факторы: повышенная и пониженная температура воздуха; чрезмерная запыленность и загазованность воздуха; повышенная и пониженная влажность воздуха; недостаточная освещенность рабочего места; превышающий допустимые нормы шум; повышенный уровень ионизирующего излучения; повышенный уровень электромагнитных полей; повышенный уровень статического электричества; опасность поражения электрическим током; блеклость экрана дисплея. Рассмотрим более подробно один из факторов, а именно недостаточную освещенность рабочего места оператора. Для этого проведем расчет освещенности и оценим соответствие полученных данных требуемым нормам. 5.1.2 Расчет искусственного освещения рабочего места В связи с тем, что естественное освещение в помещении не достаточное, на рабочем месте должно применяться искусственное освещение. Далее произведем расчет искусственного освещения. Исходные данные: Размеры помещения. l- длина помещения 9 м b- ширина помещения 5 м h = 3,5 м. - высота помещения hc = 0,5 м. - расстояние светильников от перекрытия hп = h – hс = 3,5 - 0,2 = 3,3 м. - высота светильников над полом hp = высота расчетной поверхности = 0,7 м (для помещений, связанных с работой ПЭВМ) h = hп – hр = 2,5 - 0,7 = 1.8 - расчетная высота. Светильник ЛВО 11-4х18-401 классификация по ГОСТ 17677-82. Прямой трубчатый люминесцентный светильник с номером серии 11, с количеством ламп в светильнике 4, и мощностью лампы 18 вт, 401-й модификации. Рисунок 5.1 Конструкция светильника Таблица 5.1 – технические характеристики светильника. Наименование светильника P,вт L b h ЛВО 11-4х18-401 72 595 595 100 Конструкция светильника: Тип крепления светильника – встраиваемый в ячейки размерами 600x600 мм. Корпус светильника изготовлен из листовой стали и окрашен полимерным составом. Рассеиватель - алюминиевый отражатель с экранирующей решеткой. Технические данные: Использование ЭПРА. Источник света - люминесцентные лампы Т8. Степень IP20. Класс защиты I,II. Климатическое исполнение УХЛ4. Тип кривой силы света ”Г”. Защитный угол – условный > 30°. КПД 70%. На данный момент с светильниках 4 люминесцентные лампы Т8 мощностью 18 ВТ, номинальный размер ламы 600х25, цоколь G13, схема со стартером, и номинальным световым потоком 1020 лм по ГОСТ 6825-91 «Лампы люминесцентные трубчатые для общего освещения» Размещение светильников: Рисунок 5.2 - Существующее расположение светильников Расчет общего равномерного искусственного освещения горизонтальной рабочей поверхности выполняется методом коэффициента использования светового потока. Световой поток (лм) одной лампы или группы люминесцентных ламп одного светильника (1) где Ен - нормируемая минимальная освещенность по СНиП 23-05-95, лк, в данном случае Е=300 лк, поскольку разряд зрительных работ равен трем. S - площадь освещаемого помещения, м2. S=45м2. z - коэффициент неравномерности освещения, z= 1,1 (для люминесцентных ламп) kз, - коэффициент запаса, зависящий от вида технологического процесса и типа применяемых источников света, kз = 1,3 (для помещений, связанных с работой ПЭВМ) n - число светильников в помещении; -коэффициент использования светового потока. Коэффициент использования светового потока, давший название методу расчета, определяют по СНиП 23-05-95 в зависимости от типа светильника, отражательной способности стен и потолка, размеров помещения, определяемых индексом помещения , где А, В - длина и ширина помещения в плане, м; H - высота подвеса светильников над рабочей поверхностью, м. Оценим коэффициенты отражения поверхностей помещения пот. (потолка) = 70%, ст. (стены) = 50%, р. (пола) = 30%. Рассчитаем световой поток необходимый от одного светильника при данном расположении. Ф = 300  1,3  45  1,1 / 4 0,3 = 16087.5 лм. Такой световой поток у нас должен обеспечить один светильник. Но при тех лампах, что у нас установлены в светильниках мы получаем 4*1020= 4080 лм, что намного ниже нормы. Изменим схему расположения светильников. Поставим светильники в три ряда. Предложенная схема расположения светильников в помещении. Рисунок 5.3 - Предложенное расположение светильников Рассчитаем световой поток необходимый от одного светильника после изменения расположения светильников. Ф = 300  1,3  45  1,1 / 16 0,3 = 4022 лм. В данном случае наше освещение будет удовлетворять условиям. 4080> 4022. Значит, мы сможем равномерно осветить всю площадь помещения. 5.2 Охрана окружающей среды 5.2.1 Анализ вредных и опасных факторов воздействующих на окружающую среду В помещении, где находится рабочее место оператора, воздух на выходе из системы вентиляции не подвергается очистке. Для того чтобы загрязненный воздух из системы не попадал в атмосферу его необходимо очищать. Очистка газа от твердых или жидких взвесей осуществляется путем присасывания его через ту или иную твердую пористую среду, образованную из нитей, волокон, зерен и самой осажденной пыли. Кроме инерции, здесь могут играть роль броуновская диффузия частиц, эффект касания, иногда ситовой эффект. Особое место занимают фильтрационные устройства, использующие ультратонкие полимерные волокна с электростатическим зарядом (ткани Петрянова). Эти фильтры приближаются к абсолютным, однако, к сожалению, не регенерируются и поэтому применяются в основном для фильтрации очень слабо запыленных газов. 5.2.2 Установка рукавного фильтра для очистки удаляемого воздуха Для очистки предлагаю установить на выходе системы рукавный фильтр типа ФРИ-16. Фильтр рукавный с импульсной регенерацией рукавов типа ФРИ-16 представляет собой надежный и эффективный пылеулавливающий аппарат, предназначенный для обеспыливания воздуха и негорючих газов. Область применения: в стройиндустрии, металлургии, машиностроении, химической, пищевой промышленности и других отраслях. В закрытом металлическом корпусе 1 фильтра подвешиваются матерчатые рукава 2 цилиндрической формы. Рукава собраны в секции по 8…12 штук. Секции разделены перегородками на отдельные камеры. Нижние концы рукавов открыты для входа газов. Запыленный газ по трубопроводу 3 подводится в нижнюю часть 4 фильтра, откуда направляется в нижние открытые отверстия рукавов. Проходя через поры ткани, газ очищается, оставляя пыль на внутренних стенках рукавов. Очищенный газ собирается в верхней части металлического кожуха, затем отводится через трубу 5 в общий трубопровод 6. Через матерчатые фильтры газ просасываетс Размер файла: 3,7 Мбайт Фаил: ------------------- Обратите внимание, что преподаватели часто переставляют варианты и меняют исходные данные! Если вы хотите, чтобы работа точно соответствовала, смотрите исходные данные. Если их нет, обратитесь к продавцу или к нам в тех. поддержку. Имейте ввиду, что согласно гарантии возврата средств, мы не возвращаем деньги если вариант окажется не тот. -------------------
Коментариев: 0 |
||||
Есть вопросы? Посмотри часто задаваемые вопросы и ответы на них. Опять не то? Мы можем помочь сделать! |
||||
Вход в аккаунт:
Страницу Назад
Cодержание / Технология обслуживания и ремонта машин в АПК / Модернизация стенда для диагностики тормозной системы автомобиля (конструкторская часть дипломного проекта + чертеж)
Вход в аккаунт: