
Страницу Назад
Поискать другие аналоги этой работы
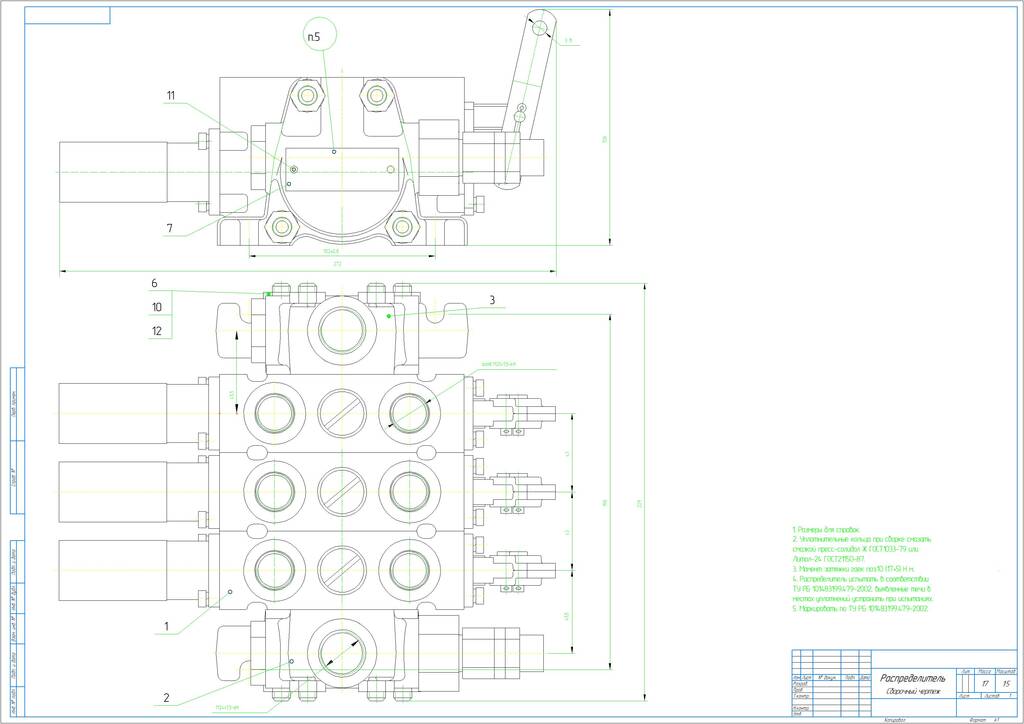
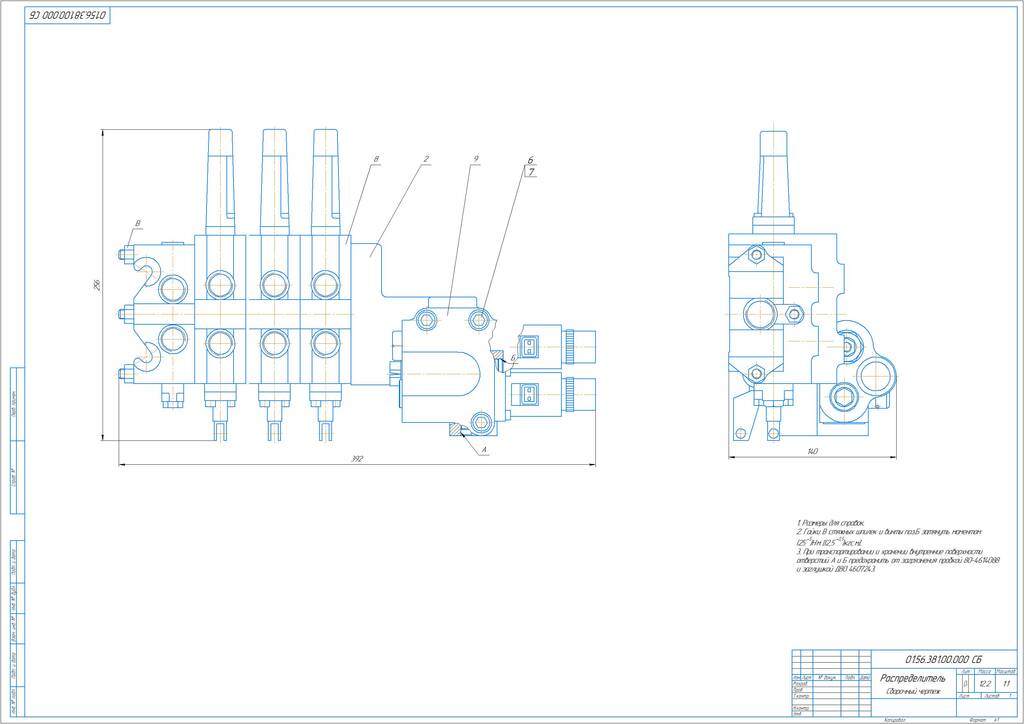
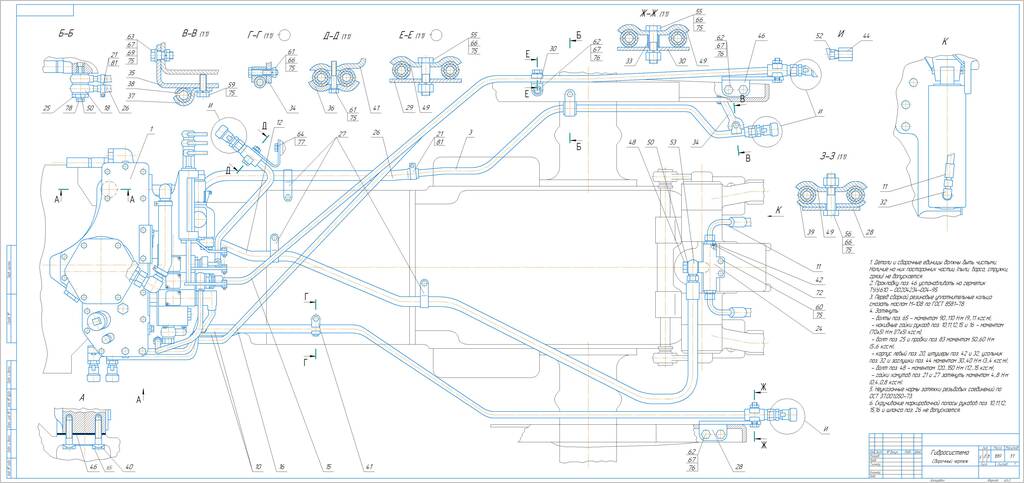
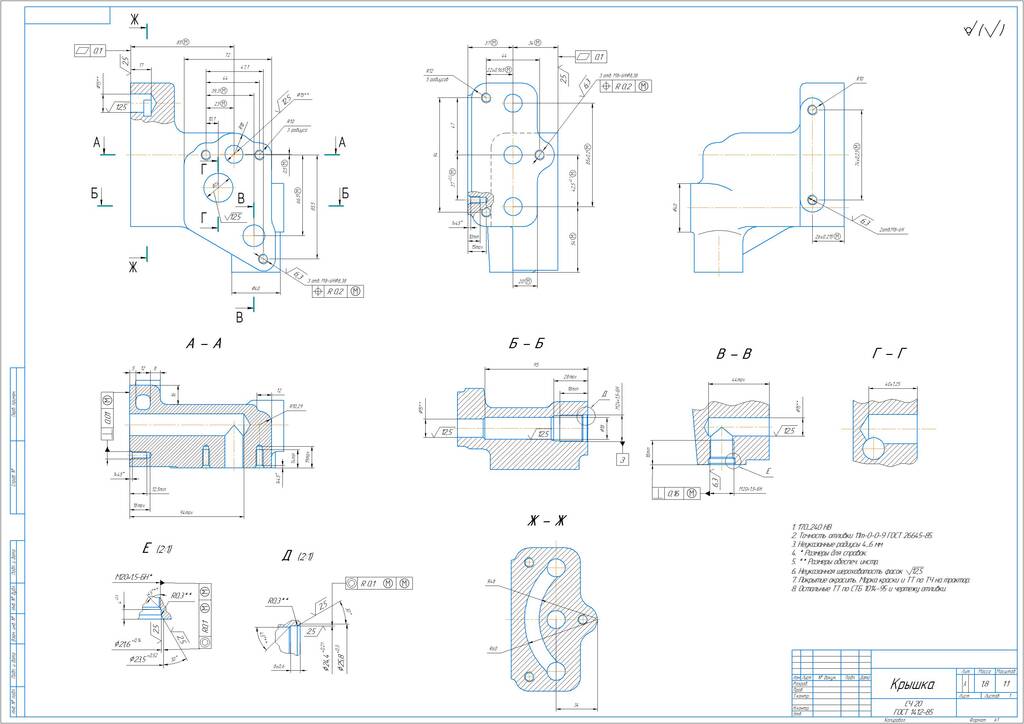
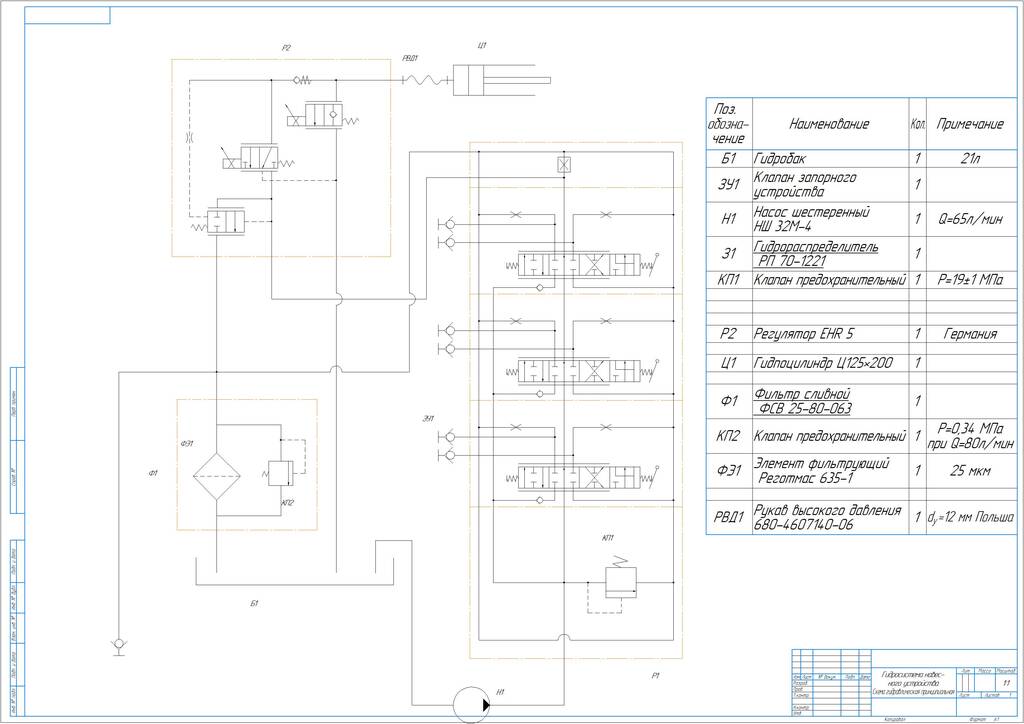
Модернизация электрогидравлического гидрораспределителя трактора Беларус-1523 с целью повышения эффективности управления навесным устройством (дипломный проект)ID: 234921Дата закачки: 02 Апреля 2023 Продавец: Shloma (Напишите, если есть вопросы) Посмотреть другие работы этого продавца Тип работы: Диплом и связанное с ним Форматы файлов: КОМПАС, Microsoft Word Описание: Дипломный проект Содержание: ВВЕДЕНИЕ 1. Характеристика хозяйства 2. Анализ использования колесных тракторов класса 2…5 2.1. Колесные трактора класса 2…5 2.2. Краткое описание трактора «Беларус-1523» 2.3. Зарубежный опыт 3. Лабораторные исследования электрогидравлической системы управления навесным устройством фирмы «BOSCH» 3.1. Описание электрогидравлической системы 3.1.1. Электрогидравлический регулятор 3.1.2. Микропроцессорный контроллер 3.1.3. Пульт управления 3.1.4. Датчик положения 3.1.5. Датчик усилия 3.2. Лабораторные исследования компонентов системы 3.2.1. Электрогидравлический распределитель 3.2.2. Датчик положения 3.3. Заключение 4. Выбор и обоснование разрабатываемого узла 5. Расчетная часть 5.1. Тяговый расчет трактора 5.1.1. Методика расчета тяговой характеристики трактора 5.1.2. Результаты расчета тяговой характеристики трактора 5.1.3. Графики тяговых характеристик трактора 5.2. Расчет механизма навески 5.2.1. Определение сил, действующих в звеньях механизма задней навески при подъеме плуга 5.2.2. Расчет раскоса 5.2.3. Расчет центральной тяги 5.2.4. Расчет винтов центральной тяги 5.2.5. Расчет оси продольной тяги 5.2.6. Болты крепления кронштейна поворотного вала к корпусу заднего моста 5.2.7. Штифт 5.2.8. Втулка 5.2.9. Болты крепления кронштейна цилиндра к корпусу заднего моста 5.2.10. Расчет поворотного вала 6. Обоснование и расчет операционно-технологической карты на основную обработку почвы 7. Расчеты экономических показателей 7.1. Технико-экономические показатели конструкторской разработки 7.2. Расчет производительности агрегата и годового объема работ 7.3. Расчет трудозатрат и роста производительности труда 7.4. Материалоемкость процесса 7.5. Энергоемкость процесса 7.6. Расход топлива 7.7. Капиталоемкость процесса 7.8. Расчет эксплуатационных затрат и их экономии 7.9. Расчет эффективности капитальных вложений 8. Безопасность жизнедеятельности 8.1. Безопасность жизнедеятельности на производстве 8.1.1. Анализ состояния охраны труда на предприятии и мероприятия по его улучшению 8.1.2. Мероприятия по созданию здоровых и безопасных условий труда, обеспечению безопасных методов работы при эксплуатации трактора тягового класса 5 8.1.3. Оценка продольной и поперечной устойчивости трактора 8.1.4. Инженерные мероприятия по обеспечению взрыво- и пожаробезопасности при эксплуатации трактора 8.1.5. Мероприятия по обеспечению безопасности в чрезвычайных, экологически неблагоприятных ситуациях. Система организации ГО на РУП МТЗ ЗАКЛЮЧЕНИЕ ЛИТЕРАТУРА 3. ЛАБОРАТОРНЫЕ ИССЛЕДОВАНИЯ ЭЛЕКТРО-ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ НАВЕСНЫМ УСТРОЙСТВОМ ФИРМЫ БОШ 3.1. Описание электрогидравлической системы управления Электрогидравлическая система предназначена для управления навесным устройством трактора в ручном и автоматическом режимах. Причем управление механизмом навески осуществляется при помощи однополостных гидроцилиндров (рис. 3.1). При этом реализованы такие функции управления навесным устройством, как фиксирование в заданном положении, подъем и опускание под собственным весом. Рис. 3.1. Расположение компонентов электрогидравлической СУ фирмы БОШ на тракторе При фиксировании навесного устройства в заданном положении рабочие полости силовых гидроцилиндров заперты и разобщены с источником питания. В режиме подъема навесного устройства указанные полости сообщаются с источником питания. При опускании навесного устройства под собственным весом рабочие полости гидроцилиндров соединены с гидробаком. В автоматическом режиме управления электрогидравлическая система обеспечивает позиционное, силовое и смешанное регулирование. Система также может быть дополнительно укомплектована радаром и датчиком числа оборотов ведущих колес, что позволяет регулировать их буксование. Причем в этом случае контуры регулирования усилия и буксования работают совместно. Конструктивная схема электрогидравлической системы приведена на рис. 3.2. Рис. 3.2. Конструктивная схема электрогидравлической СУ навесным устройством фирмы БОШ Система включает насос 1 постоянной производительности, электрогидравлический регулятор 2 типа EHR5, силовой гидроцилиндр 3, микропроцессорный контроллер 4, силовые датчики 5, установленные в нижних тягах механизма навески, датчик положения 6, кинематически связанный с поворотным валом упомянутого механизма, а также пульт управления 7. Работает электрогидравлическая система управления следующим образом. Рабочая жидкость от насоса 1 поступает к электрогидравлическому регулятору 2, который управляет силовым гидроцилиндром 3. Заданные значения регулируемых параметров вводятся посредством пульта управления 7 в память микропроцессорного контроллера 4. Фактические значения регулируемых ^ параметров поступают соответственно от позиционного датчика 6 и датчиков усилия 5 в тягах механизма навески. Микропроцессорный контроллер производит вычисление соответствующего рассогласования и вырабатывает сигнал управления, поступающий на пропорциональные электромагниты регулятора 2. В позиционном режиме регулируемой величиной является положение навесного устройства относительно трактора. При этом фактическое значение указанной величины определяется посредством датчика положения 6. В силовом режиме регулируемой величиной служит усилие тягового сопротивления рабочих органов, реакция которого измеряется в шарнирах нижних тяг посредством датчиков усилия 5. При отклонении регулируемой величины от заданного значения происходит коррекция рабочих органов по глубине. При смешанном регулировании сигналы от датчиков 5 и 6 поступают на вход микропроцессорного контроллера, где смешиваются в заданном соотношении и обрабатываются как регулируемая величина. Функциональная схема электрогидравлической системы управления навесным устройством фирмы БОШ приведена на рис. 3.3. Помимо функций управления и обработки сигналов, получаемых с выходов датчиков, микропроцессорный контроллер обеспечивает выполнение различных функций безопасности. Так, отсутствие движения механизма навески при включенном электромагните подъема вызывает аварийное отключение напряжения питания системы. Возвращение в рабочее состояние происходит путем переключения рукоятки пульта управления в транспортное положение. Максимальная высота подъема механизма навески также контролируется микропроцессорным контроллером. Величина ограничения может задаваться посредством потенциометра. Аварийное отключение системы происходит также при повреждении или коротком замыкании кабеля датчика положения. Кроме того, алгоритм управления системой позволяет обеспечить защиту узлов механизма навески двигающегося агрегата от перегрузок путем демпфирования колебаний навесного орудия, поднятого в транспортное положение. Для измерения инерционных перегрузок используется сигнал, поступающий от силовых датчиков. Рис. 3.3. Функциональная схема электрогидравлической СУ навесным устройством фирмы БОШ: I - ток управления; Q - расход рабочей жидкости; S - перемещение навесного устройства; F - усилие в нижних тягах; о - величина буксования; VT - фактическая скорость движения трактора; Vr - теоретическая скорость движения трактора; S\', F\' σ\' - электрические сигналы от соответствующих датчиков регулируемых параметров; а - коэффициент смешения. 3.1.1. Электрогидравлический регулятор. Регулятор предназначен для управления потоком рабочей жидкости, поступающим от насоса в полости гидроцилиндров. Общий вид, а также принципиальная гидравлическая и конструктивная схемы регулятора ЕНR5 приведены на рис 3.3, 3.4 и 3.5. Рис. 3.3. Общий вид регулятора EHR5 Рис.3.4. Принципиальная гидравлическая схема регулятора EHR5: А-гидроцилинр; Р-насос; Н-электромагнит подъема; S-электромагнит опускания; Ri-слив гидроцилиндра; Яг-слив насоса Регулятор состоит из перепускного золотника 1, впускного клапана 2, выпускного клапана 3, обратного клапана 4, расположенных в литом \' корпусе 5, а также пропорциональных электромагнитов подъема и опускания соответственно 6 и 7. Работает электрогидравлический регулятор следующим образом. При обесточенных электромагнитах 6 и 7 поток рабочей жидкости от насоса Р поступает к торцу перепускного золотника 1, пружинная полость которого посредством впускного клапана 2 соединена со сливом R2. Под действием давления перепуска золотник 1, сжимая пружину, сдвигается, обеспечивая прохождение указанного потока на слив Rj. Так осуществляется разгрузка насоса. При этом давление рабочей жидкости, создаваемое весом навесного орудия, прижимает обратный 4 и выпускной 3 клапаны к седлам, и навесное орудие фиксируется в заданном положении. При возбуждении обмотки электромагнита подъема 6 впускной клапан 2 сдвигается пропорционально току управления и отсоединяет пружинную полость перепускного золотника 1 от слива R.2. Давления на торцах упомянутого золотника выравниваются, он под действием пружины отсоединяет насос от слива Rj, и поток рабочей жидкости поступает через обратный клапан 4 в полости гидроцилиндров А. Навесное устройство при этом перемещается в сторону подъема с заданной скоростью. При возбуждении обмотки электромагнита опускания 7 полость управления выпускного клапана 3 разгружается по давлению, клапан, сжимая пружину, сдвигается, соединяя полости гидроцилиндра со сливом R2. Вследствие этого происходит опускание навесного орудия под собственным весом с заданной скоростью, пропорциональной току управления. 3.1.2. Микропроцессорный контроллер. Микропроцессорный контроллер выполняет все логические функции управления электрогидравлической СУ согласно алгоритму и в значительной мере определяет надежность работы всей системы. Контроллер имеет также функцию тестирования всех электронных компонентов системы. Контроллер содержит источник стабилизированного напряжения, микропроцессор фирмы СИМЕНС, усилители для пропорциональных электромагнитов. С учетом этого разработаны конструкции его корпуса, разъема и креплений электронных компонентов. Общий вид контроллера приведен на рис, 3.6. Рис. 3.6. Общий вид микропроцессорного контроллера Таблица 3.1. Технические характеристики микропроцессорного контроллера фирмы БОШ Функции Аналогичный управляющий усилитель Исполнение Электронная плата в пластмассовом корпусе Разъем 25 контактов Напряжение питания 12…15В Потребляемый ток В нейтрали: 0,2 А При коррекции: 3.8 А (макс) Рабочий температурный диапазон -30...+65˚С Тип безопасности IP 54 А (при подключенном разъеме) Виброзащищенностъ 2-5g 3.1.3. Пульт управления. Пульт управления предназначен для включения контроллера, выбора режима работы СУ и управления навесным устройством. Общий вид пульта управления приведен на рис. 3.7. Рис 37. Общий вид пульта управления Пульт содержит рукоятку включения подъема 1 с переключателем блокировки положения 2, задатчик уровня регулируемой величины 3,, жидкокристаллический дисплей 4 с сенсорными выключателями 5 для ограничения высоты подъема навесного устройства, выбора скорости опускания и коэффициента смешения, выключатель 6 для включения режима демпфирования колебаний навесного орудия, а также выключатель 7 для включения режима диагностики электронных компонентов СУ. Технические характеристики пульта приведены в табл. 3.2. Таблица 3.2 Технические характеристики пульта управления электрогидравлической СУ фирмы БОШ Разъем 17 контактов Потенциометр 4,7 кОм Рабочий температурный диапазон -20...+80°С Тип безопасности IP 64 А 3.1.4. Датчик положения. Датчик положения предназначен для измерения положения навесного орудия относительно трактора. При этом датчик кинематически связан с поворотным валом навесного устройства. Возможны два варианта исполнения: датчик линейного перемещения и датчик угла поворота. Конструктивные схемы указанных датчиков приведены на рис. 3.8 и 3.9. Рис. 3.6. Конструктивная схема датчика линейного перемещения Датчик линейного перемещения содержит литой корпус из алюминиевого сплава 1, дифференциальную индуктивную катушку 2, ферромагнитный сердечник 3, подвижный толкатель 4 с шаровым наконечником в пластмассовой втулке, электронную плату 5 и пылезащитный сильфон 6. При контакте шарового наконечника с профилем кулачка, расположенного на поворотном валу навесного устройства, посредством толкателя 4 ферромагнитный сердечник 3 перемещается относительно катушки 2. Данная система образует измерительный мост, на выходе которого за счет изменения индуктивности магнитной системы посредством амплитудной модуляции снимается переменное напряжение, пропорциональное входному воздействию. Полученный на выходе сигнал переменного тока выпрямляется и усиливается до стандартного уровня. Технические характеристики датчика линейного перемещения приведены в табл. 3.3. Таблица 3.3 Технические характеристики датчика линейного перемещения фирмы БОШ Тип преобразователя Индуктивный дифференциальный Линейный диапазон измерения 10 ±0,6 мм Максимальный диапазон измерения 13 ±0,6 мм Измерительное усилие 16Н Напряжение питания 10 В; Опорное напряжение -7 В; 4...7 кГц Выходной сигнал 2,5...7,5 В Уровень нелинейности ±3% Тип безопасности IP64A Рабочий температурный диапазон -30...+80°С Разъем 3 контакта 3.1.5. Датчик усилия. Датчик усилия предназначен для измерения усилия в нижних тягах навесного устройства. Конструктивная схема указанного датчика приведена на рис. 3.40, Рис. 3.9.Конструктивная схема датчика усилия Датчик усилия содержит магнитопровод 1, базирующийся внутри силовводящей втулки 2 и встроенную электронную плату 3. Силовводящая втулка 2, выполненная из магнитомягкого материалов, образует с магнитопроводом 1 магнитную систему. При возникновении сдвиговых напряжений в силовводящей втулке-2 происходит изменение магнитной проницаемости нагруженного ; участка, вследствие чего изменяется коэффициент трансформации между питающей и сигнальной обмотками. Электрический сигнал переменного*! токаv с выхода трансформатора посредством электронной платы 3 преобразуется в унифицированный выходной сигнал постоянного тока. Технические характеристики датчика усилия приведены в табл. 3.4. Таблица 3.4 Технические характеристики датчика усилия фирмы БОШ Тип преобразователя Магнитоупругий Номинальная нагрузка ±60кН Допустимая перегрузка ±160кН Напряжение питания 10 ±0,5 В Выходной сигнал 2,5…7,5 В Уровень нелинейности ± 8 % Гистерезис ±3% Тип безопасности IP 66 А Рабочий температурный диапазон -30…+80°С Разъем 3 контакта 3.2. Лабораторные исследования компонентов системы 3.2.1. Электрогидравлический распределитель. Для анализа конструкции распределителя EHR5 была произведена его разборка и выполнен эскизный чертеж конструктивной схемы (см. рис. 3.5). Оценка диапазона перестановочных усилий, действующих на золотники и клапаны распределителя, производилась на основании тяговых характеристик его электромагнитов (рис. 3.11)." С помощью гидравлического стенда были получены переходные характеристики электрогидравлического распределителя путем осциллографирования рабочих процессов с помощью светолучевого осциллографа Н-105 (рис.3.12, 3.13). Анализ вышеприведенных характеристик показывает время и форму нарастания управляющего тока на основе широтно-импульсной модуляции с периодом 0,005с и величину запаздывания давления в гидроцилиндре, составляющей 0,07 с. Переходные процессы в системе управления EHR5 (по данным фирмы БОШ) при подъеме и опускании навесного устройства без орудия на тракторе МТЗ 1523 приведены на рис. 3.14 и 3.15. Расходные характеристики электрогидравлического регулятора EHR5 косвенно определены на стенде путем установления зависимости времени полного подъема и опускания навесного устройства от величины управляющего тока на обмотках соответствующих электромагнитов. Результаты эксперимента приведены в таблице З.б. Таблица 3.6 Время подъема и опускания навесного устройства в зависимости от управляющего тока Управляющий ток, А Время, с Подъем Опускание 0,6 - - 1,0 10,0 90,0 1,2 7,0 60,0 1,3 4,5 47,0 1,5 4,0 11,0 2,0 3,4 4,0 2,5 3,0 3,5 3,0 2,8 3,0 Результаты, приведенные в таблице 3.6 показывают, что изменение управляющего тока в 3 раза в несколько раз изменяют скорости подъема и опускания навесного устройства. Датчик усилия. Измерение реакции в шарнирах нижних тяг производится при помощи магнитоупругого первичного преобразователя пальцевого типа со встроенной электронной платой. Градуировочная характеристика датчика усилия (рис.3.16) была получена с помощью оригинального нагружающего пресса и специальной оснастки, позволяющих воспроизводить условия работы датчика в шарнирах нижних тяг навесного устройства. Данная характеристика устанавливает зависимость выходного сигнала датчика U от нагрузки F, при этом гистерезис, характеризующий его упругие свойства, составляет ± 0,1В. К недостаткам конструкции указанного датчика следует отнести высокие прочностные и электрические требования к материалу силовводящей втулки. Кроме того, необходимо прецизионное исполнение и точное базирование (центрирование без зазора) элементов магнитопровода с обмотками относительно внутренней поверхности вышеупомянутой втулки. Рис. 3.16. Градуировочная характеристика датчика усилия. Из отечественных материалов указанными свойствами (упругость и магнитная проводимость) обладают дисперсионно твердеющие материалы на основе сплава никеля, хрома, титана и алюминия (сплав 44 НХТЮ). Стоимость указанного сплава и трудоемкость в несколько раз выше, чем у известных конструкционных легированных сталей, например 60С2А, ШХ15, 65Г, 40Х и т.п. Конструирование датчика усилия пальцевого типа на основе индуктивного преобразователя микроперемещений не предъявляет требований к электрическим свойствам силовводящей втулки, а точность базирования элементов иагнитопровода обеспечивается обычным микровинтом. 3.2.2. Датчик положения. Положение навесного орудия относительно остова трактора регулируется путем введения обратной связи через кулачок с подъемным профилем, установленный на поворотном валу. Изменение высоты подъема указанного кулачка определяет индуктивный первичный преобразователь контактного типа со встроенной электронной платой. Градуировочная характеристика датчика положения приведена на рис. 3.17. Рис. 3.17. Градуировочная характеристика датчика положения Вышеприведенная зависимость отражает высокую линейность выходного сигнала U от линейного перемещения X штока датчика и отсутствие гистерезиса. Анализ конструкции датчика положения позволяет определить следующие недостатки, приведенные в таблице 3.7. Таблица 3.7 Анализ конструкции датчика положения фирмы БОШ Номер п/п Конструктивные решения Вид отказа или отрицательный фактор 1 2 3 Отсутствие второй опоры скольжения у штока датчика Перекос штока, износ опоры скольжения и повреждение контактного шарика 2 Электронная плата выполне¬на в виде круга Увеличение габарита датчик по диаметру, использование гаечного ключа больших размеров (36 мм). 3 Размещение вилки разъема непосредственно на датчике Увеличение разъема датчика Продолжение таблицы 3.7 4 Размещение резинового гофра, между шаровым на¬конечником и корпусом Увеличение размера датчика 5 Катушка индуктивности выполнена длиной более 50 мм Длина катушки избыточна для достижения линейности в пределах 2-х процентов 6 Корпус датчика выполнен из алюминиевого сплава Пониженная механическая прочность на скручивание 7 Датчик выполнен контакт¬ным Износ шарового наконечника и направляющей штока, смещение настройки и вероятность полом¬ки Лабораторные исследования образца электрогидравлической СУ показали его высокие динамические и метрологические свойства. При конструировании образца-аналога упомянутой системы необходимо повысить надежность ее функционирования путем снижения чувствительности регулятора к загрязнению рабочей жидкости механическими примесями, реализации бесконтактного принципа измерения перемещения навесного устройства и индуктивного способа измерения усилий в шарнирах нижних тяг. 3.3. ЗАКЛЮЧЕНИЕ 1. Разработка электрогидравлического контура регулирования по давлению в гадроцилиндре позволит реализовать регулирование глубины обработки почвы путем копирования рельефа опорным колесом без динамических возбуждений. Стабилизация реакции на упомянутом колесе не сопровождается перемещением массивных узлов относительно остова трактора, а обеспечивается подпиткой полости гидроцилиндра рабочей жидкостью. 2. Задача разработки электрогидравлического контура регулирования по давлению в гадроцилиндре требует использования различных методов и средств. В частности, выбор параметров контура целесообразно проводить с помощью математической модели, описывающей динамические процессы в гидросистеме и алгоритм управления, обеспечиваемый микропроцессорным контроллером. Среди методов исследования особый интерес представляет экспериментально-статистический метод. 3. Одной из основных схем исполнения тракторного гидропривода для управления навесными орудиями является система постоянного расхода, для которой характерно использование насоса постоянной подачи, отличающаяся относительной простотой конструкции и невысокой стоимостью. Возможность независимого управления несколькими потребителями, а также высокую чувствительность и плавность работы обеспечивают системы постоянного давления. Наибольшее применение в отечественной и мировой практике до последнего времени имели гидромеханические системы управления. Как следует из приведенного обзора схем и параметров тракторных систем управления навесными устройствами, повышение требований надежности и необходимость улучшения качества управления путем снижения инерционных нагрузок на трактор и оператора, уменьшения нечувствительности определили их развитие в направлении применения современных средств автоматики на базе электрогидравлики и микропроцессорной техники. 4. Стенд и оснастка для исследования электрогидравлической системы управления позволяют в лабораторных условиях воспроизвести работу упомянутой системы и ее компонентов с целью определения статических и динамических характеристик: 5. Система управления фирмы БОШ в автоматическом режиме обеспечивает позиционное, силовое и смешанное регулирование. Осциллографирование переходных процессов регулятора указывают на управление электромагнитами с помощью широтно¬импульсной модуляции с периодом 0,005с, причем величина запаздывания давления в гидроцилиндре составляет 0,07с. Экспериментально установлено, что изменение управляющего тока на обмотках электромагнита в 3 раза изменяет скорости подъема и опускания навесного устройства в несколько раз. 5.1.Конструкция электрогидравлического регулятора предусматривает двухкаскадное управление подъемом и опусканием навесного устройства при максимальной мощности электромагнитного привода 15Вт. Тяговые характеристики электромагнитов регулятора EHR5 показывают, что максимальное усилие на толкателе 40Н достигается при минимальном воздушном зазоре (ход 3 мм) магнитопровода и управляющем токе ЗА. Прецизионные распределительные элементы регулятора предполагают его чувствительность к загрязнению рабочей жидкости механическими примесями. 5.2.Микропроцессорный контроллер выполняет все логические функции управления электрогидравлической СУ согласно алгоритму, а также функцию тестирования электронных компонентов системы. 5.3.Результаты лабораторных и эксплуатационных испытаний показывают, что датчик положения контактного типа при нелинейности менее 2 % и отсутствии гистерезиса подвержен износу и повреждениям. Для устранения указанных недостатков целесообразно конструкцию упомянутого датчика выполнить на бесконтактном принципе. 5.4.Градуировочная характеристика датчика усилия указывает на его высокие метрологические свойства: нелинейность менее 2 % и гистерезис не более ±0.1 В. К недостаткам магнитоупругого датчика следует отнести высокие прочностные и электрические требования к материалу силовводящей втулки. Кроме того, необходимо прецизионное исполнение и точное базирование элементов магнитопровода. 4. ВЫБОР И ОБОСНОВАНИЕ РАЗРАБАТЫВАЕМОГО УЗЛА Одним из важнейших показателей технического уровня трактора яв-ляется возможность автоматического регулирования глубины обработки поч¬вы. Соответствующие системы автоматического регулирования навесных уст¬ройств (САРН) обеспечивают выполне¬ние технологического процесса различными машинно-тракторными агрегатами в разнообразных почвенных условиях. Применение САРН облегчает управление навесными и полунавесны¬ми орудиями с места водителя, повыша¬ет производительность и экономичность машинно-тракторных агрегатов за счёт улучшения тягово-сцепных свойств трактора, снижения тягового сопротив¬ления орудия и динамических нагрузок на трактор. Современные САРН предус¬матривают возможность позици¬онного регулирования — по по¬ложению орудия относительно трактора и силового регулиро¬вания — по величине силового воздей¬ствия на трактор, когда автоматическое перемещение орудия определяется усилием в тягах навесного устройства. Кроме того, в большинстве случаев имеется возможность комбинирован¬ного регулирования со «смешением» в любой необходимой пропорции позици¬онного и силового сигналов. Это обес¬печивает максимальную загрузку двига¬теля и производительность машинотракторного агрегата (что характерно для силового регулирования) и предотвра¬щает нарушение агротехнических тре¬бований по глубине обработки почвы из-за непостоянства её сопротивления (на-иболее эффективно при позиционном способе регулирова¬ния). Обобщённая схема САРН предс¬тавлена на рисунке 1. Источником питания является насос гид¬ронавесной систе¬мы. Распределитель-регулятор управляет гидроцилиндром (ис¬полнительным меха¬низмом) навесного устройства, осущес¬твляя коррекцию его положения при на¬личии рассогласования между действи¬тельным и заданным положением меха-низма навески с агрегатируемой машиной (орудием). С помощью устрой-ства управления и настройки выбирает¬ся вид регулирования и пропорции сме¬шения, а также настройка на заданный режим работы. Устройство преобразо¬вания сигналов обрабатывает и сопос¬тавляет сигналы обратной связи от дат¬чиков и задающие сигналы устройства управления и настройки и передаёт ре¬зультирующую команду к распределите¬лю-регулятору. На тракторах применяют три типа САРН: механогидравлические МГСАРН), сервогидравлические (СГСАРН) и элект¬рогидравлические (ЭГСАРН). В МГСАРН передача и формирова¬ние сигналов механические. Наличие сложной системы тяг, рычагов и форми¬рующих устройств, затруднённость ком¬поновки, потери на трение в передачах приводят к снижению качества сигналов и ухудшению динамических свойств. По¬этому использование МГСАРН в основ¬ном ограничивается тракторами отно-сительно малой мощности с линиями передачи сигналов небольшой протя-жённости. В СГСАРН для формирования ко¬манд к распределителю-регулятору ис¬пользуется система гидравлических дросселей переменного сечения, управ¬ляемых соответственно от силового и позиционного датчиков и от элементов устройства управления и настройки. СГСАРН в значительной степени устра¬няет недостатки, характерные для МГСАРН, но применение сервогидравлических систем сдерживается слож¬ностью их сочетания с бортовым компьютером и с датчиками, имеющими электрический выход. Именно поэтому производители тракторов проявляют интерес к электрогидравлическим системам. На евро¬пейских рынках наиболее широко пред¬ставлены ЭГСАРН промышленной груп¬пы «БОШ Рексрот» (ФРГ). В настоящее время под влияние мирового экономического кризиса попами много стран и практически все промышленные предприятия. Соответственно тяжелая ситуация не обошла мимо Республику Беларусь и в частности МТЗ, у которой в связи с плохой покупательской способностью клиентов упал уровень продаж, а соответственно и прибыль. Поэтому очень актуальной стала задача использовать свои ресурсы и научный потенциал и постепенно отказаться от импортных товаров. Поэтому в моей дипломной работе было предложено заменить Финский гидравлический распределитель в электрогидравлической системе управления навеской трактора, на распределитель РП-70, выпускаемый в Республике Беларусь. Данный распределитель обладает теми же параметрами, что и его иностранный «коллега», но слегка отличается конструктивно. Это было предложено устранить путем создания переходной крышки. Данное внедрение позволит дать возможность белорусским предприятиям запустить свои промышленные мощности на более высокий уровень и дать возможность трудоустроить население, путем открытия новых вакантных мест. А в связи с тем что РП-70 по стоимости порядком ниже чем RS-213, то и соответственно затраты на закупку заводом МТЗ будут ниже, что позволит получить дополнительную прибыль. Размер файла: 6,7 Мбайт Фаил: ------------------- Обратите внимание, что преподаватели часто переставляют варианты и меняют исходные данные! Если вы хотите, чтобы работа точно соответствовала, смотрите исходные данные. Если их нет, обратитесь к продавцу или к нам в тех. поддержку. Имейте ввиду, что согласно гарантии возврата средств, мы не возвращаем деньги если вариант окажется не тот. -------------------
Коментариев: 0 |
||||
Есть вопросы? Посмотри часто задаваемые вопросы и ответы на них. Опять не то? Мы можем помочь сделать! |
||||
Вход в аккаунт:
Страницу Назад
Cодержание / Тракторы сельскохозяйственные / Модернизация электрогидравлического гидрораспределителя трактора Беларус-1523 с целью повышения эффективности управления навесным устройством (дипломный проект)
Вход в аккаунт: