
Страницу Назад
Поискать другие аналоги этой работы
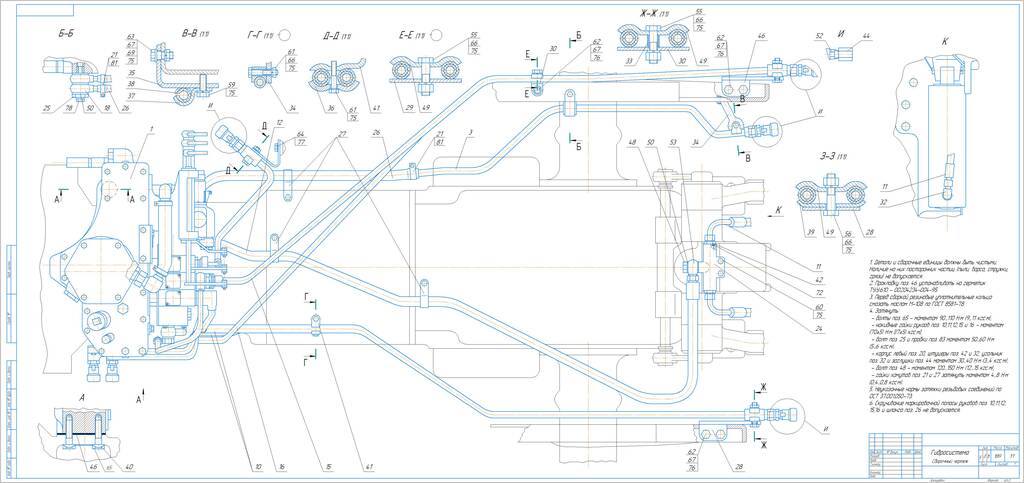
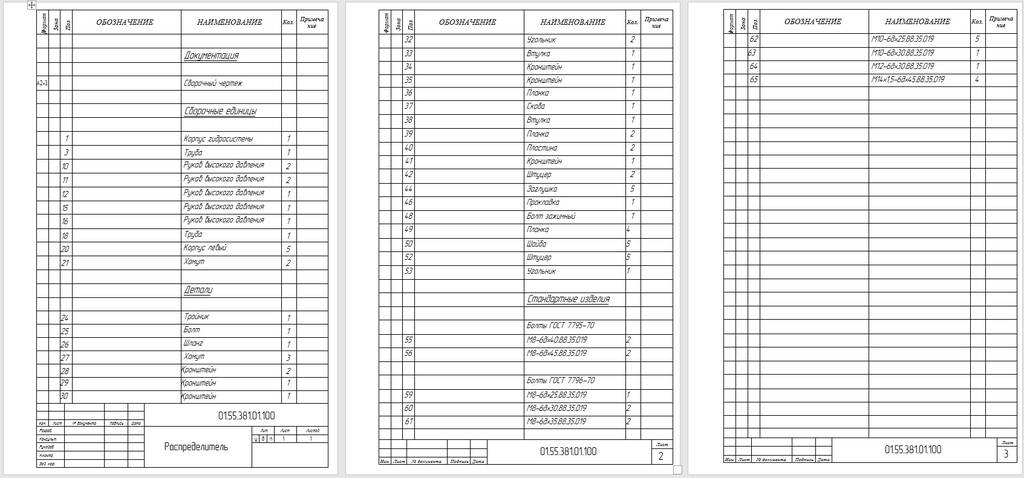
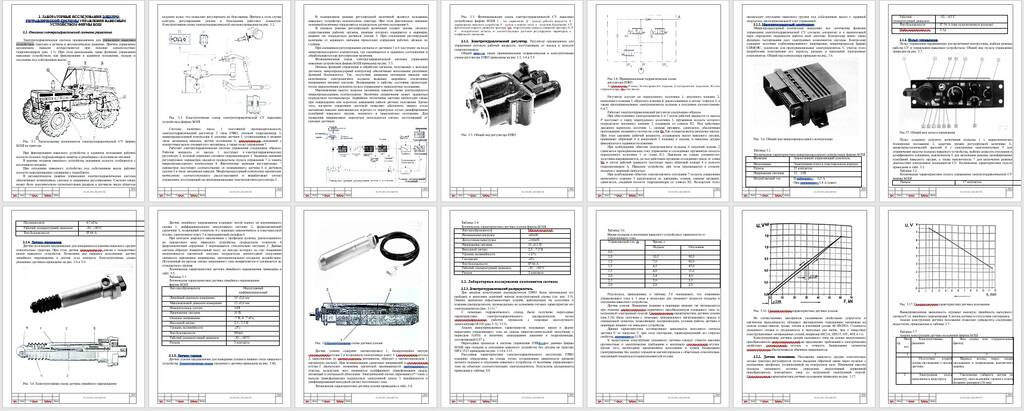

Гидросистема трактора Беларус - 1523 (сборочный чертеж)ID: 234922Дата закачки: 02 Апреля 2023 Продавец: AgroDiplom (Напишите, если есть вопросы) Посмотреть другие работы этого продавца Тип работы: Чертежи Форматы файлов: КОМПАС, Microsoft Word Описание: Электрогидравлическая система предназначена для управления навесным устройством трактора в ручном и автоматическом режимах. Причем управление механизмом навески осуществляется при помощи однополостных гидроцилиндров (рис. 3.1). При этом реализованы такие функции управления навесным устройством, как фиксирование в заданном положении, подъем и опускание под собственным весом. Рис. 3.1. Расположение компонентов электрогидравлической СУ фирмы БОШ на тракторе При фиксировании навесного устройства в заданном положении рабочие полости силовых гидроцилиндров заперты и разобщены с источником питания. В режиме подъема навесного устройства указанные полости сообщаются с источником питания. При опускании навесного устройства под собственным весом рабочие полости гидроцилиндров соединены с гидробаком. В автоматическом режиме управления электрогидравлическая система обеспечивает позиционное, силовое и смешанное регулирование. Система также может быть дополнительно укомплектована радаром и датчиком числа оборотов ведущих колес, что позволяет регулировать их буксование. Причем в этом случае контуры регулирования усилия и буксования работают совместно. Конструктивная схема электрогидравлической системы приведена на рис. 3.2. Рис. 3.2. Конструктивная схема электрогидравлической СУ навесным устройством фирмы БОШ Система включает насос 1 постоянной производительности, электрогидравлический регулятор 2 типа EHR5, силовой гидроцилиндр 3, микропроцессорный контроллер 4, силовые датчики 5, установленные в нижних тягах механизма навески, датчик положения 6, кинематически связанный с поворотным валом упомянутого механизма, а также пульт управления 7. Работает электрогидравлическая система управления следующим образом. Рабочая жидкость от насоса 1 поступает к электрогидравлическому регулятору 2, который управляет силовым гидроцилиндром 3. Заданные значения регулируемых параметров вводятся посредством пульта управления 7 в память микропроцессорного контроллера 4. Фактические значения регулируемых ^ параметров поступают соответственно от позиционного датчика 6 и датчиков усилия 5 в тягах механизма навески. Микропроцессорный контроллер производит вычисление соответствующего рассогласования и вырабатывает сигнал управления, поступающий на пропорциональные электромагниты регулятора 2. В позиционном режиме регулируемой величиной является положение навесного устройства относительно трактора. При этом фактическое значение указанной величины определяется посредством датчика положения 6. В силовом режиме регулируемой величиной служит усилие тягового сопротивления рабочих органов, реакция которого измеряется в шарнирах нижних тяг посредством датчиков усилия 5. При отклонении регулируемой величины от заданного значения происходит коррекция рабочих органов по глубине. При смешанном регулировании сигналы от датчиков 5 и 6 поступают на вход микропроцессорного контроллера, где смешиваются в заданном соотношении и обрабатываются как регулируемая величина. Функциональная схема электрогидравлической системы управления навесным устройством фирмы БОШ приведена на рис. 3.3. Помимо функций управления и обработки сигналов, получаемых с выходов датчиков, микропроцессорный контроллер обеспечивает выполнение различных функций безопасности. Так, отсутствие движения механизма навески при включенном электромагните подъема вызывает аварийное отключение напряжения питания системы. Возвращение в рабочее состояние происходит путем переключения рукоятки пульта управления в транспортное положение. Максимальная высота подъема механизма навески также контролируется микропроцессорным контроллером. Величина ограничения может задаваться посредством потенциометра. Аварийное отключение системы происходит также при повреждении или коротком замыкании кабеля датчика положения. Кроме того, алгоритм управления системой позволяет обеспечить защиту узлов механизма навески двигающегося агрегата от перегрузок путем демпфирования колебаний навесного орудия, поднятого в транспортное положение. Для измерения инерционных перегрузок используется сигнал, поступающий от силовых датчиков. Рис. 3.3. Функциональная схема электрогидравлической СУ навесным устройством фирмы БОШ: I - ток управления; Q - расход рабочей жидкости; S - перемещение навесного устройства; F - усилие в нижних тягах; о - величина буксования; VT - фактическая скорость движения трактора; Vr - теоретическая скорость движения трактора; S\', F\' σ\' - электрические сигналы от соответствующих датчиков регулируемых параметров; а - коэффициент смешения. Размер файла: 4,6 Мбайт Фаил:
Коментариев: 0 |
||||
Есть вопросы? Посмотри часто задаваемые вопросы и ответы на них. Опять не то? Мы можем помочь сделать! |
||||
Вход в аккаунт:
Страницу Назад
Cодержание / Тракторы сельскохозяйственные / Гидросистема трактора Беларус - 1523 (сборочный чертеж)
Вход в аккаунт: