
Страницу Назад
Поискать другие аналоги этой работы
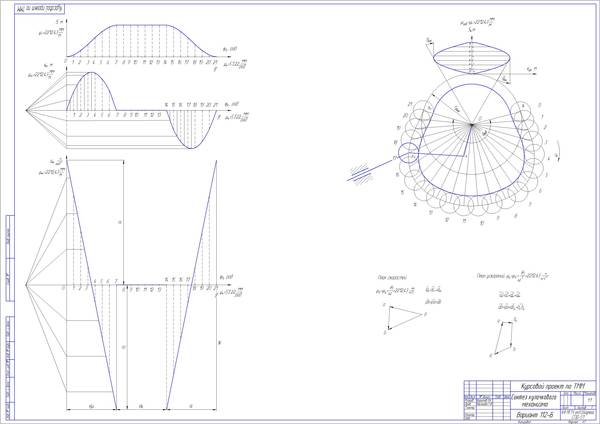

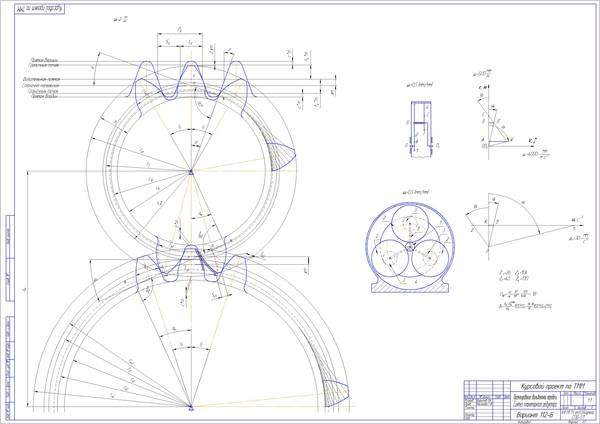
Проектирование и исследование механизмов подъёма и поворота схвата манипулятораID: 53787Дата закачки: 20 Сентября 2011 Продавец: elementpio (Напишите, если есть вопросы) Посмотреть другие работы этого продавца Тип работы: Работа Курсовая Форматы файлов: КОМПАС Описание: Лист 1.а Синтез эвольвентного зубчатого зацепления. 1.1. Исходные данные и постановка задачи. 1.2. Расчёт эвольвентного зубчатого зацепления. 1.3. Построение эвольвентной зубчатой передачи. 1.4. Графическое определение коэффициента перекрытия. 1.5. Построение станочного зацепления. 1.6 Выводы. Лист 1.б Проектирование планетарного редуктора. 1.1.Исходные данные и постановка задачи. 1.2 Основные условия проектирования многосателлитного планетарного редуктора. 1.3. Подбор чисел зубьев планетарного редуктора. 1.4. Графическая проверка передаточного отношения 2.5. Выводы. Лист 2. Динамическое исследование основного механизма. 2.1. Исходные данные и постановка задачи. 2.2. Геометрический синтез механизма. 2.3. Создание динамической модели. 2.3.1.Определение суммарного приведённого момента инерции 2.3.2. Определение суммарного приведённого момента. 2.4. Передаточные функции. 2.5. Определение приведённого момента инерции второй группы звеньев. 2.6. Построение графика приведённого момента сил тяжести. 2.7. Определение сил, действующих на поршень. 2.8. Приведённый момент движущей силы и суммарный приведённый момент 2.9. Работа суммарного приведённого момента. 2.10.Закон движения начального звена в форме 2.11. Время работы механизма. 2.12. Закон движения начального звена в формах 2.13. Выводы Лист 3. Синтез кулачкового механизма. 3.1. Исходные данные и постановка задачи 3.2.Построение кинематических диаграмм 3.3 Построение вспомогательной диаграммы 3.4. Построение профиля кулачка методом обращённого движения. 3.5. Проверка передаточных функций 3.6. Выводы Манипулятор предназначен для загрузки и разгрузки нагревательных печей. Подъём заготовок ( слитков ) 9, зажатых схватом 8 манипулятора, на высоту Н9 осуществляется рычажным механизмом с качающимся гидроцилиндром 1 (рис.1). Сила, действующая на звено 2 ( поршень со штоком ) и перемещающая его относительно цилиндра 1, изменяется согласно графику (F2,S21) на рис. 2. Движение от штока 2 передаётся звеньям 3, 4, 5, 6 и хоботу 7 со схватом 8 (рис.1). Вращение ( поворот ) схвата 8 с заготовкой 9 относительно хобота 7 осуществляется от электродвигателя 13 через двухрядный планетарный редуктор 14 со смешанным зацеплением ( число блоков сателлитов К = 3 ) и зубчатую передачу с колёсами z1 и z2 ( модуль колёс m = 10 мм ). Размер файла: 794,8 Кбайт Фаил:
Скачано: 2 Коментариев: 0 |
||||
Есть вопросы? Посмотри часто задаваемые вопросы и ответы на них. Опять не то? Мы можем помочь сделать! |
||||
Вход в аккаунт:
Страницу Назад
Cодержание / Автоматизация производственных процессов / Проектирование и исследование механизмов подъёма и поворота схвата манипулятора
Вход в аккаунт: